Основные и дополнительные функции системы дау

Основные функции
1. Обеспечение оптимальной загрузки судоводителя по управлению ГД.
2. Обеспечение заданной последовательности и длительности операций по управлению движением.
3. Предпусковое проворачивание двигателя.
4. Возможность изменения рабочих режимов двигателя в зависимости от изменения внешних условий.
5. Обеспечение защиты двигателя путем снижения оборотов или остановки при аварийных значениях отдельных параметров.
6. Аварийная остановка двигателя по команде, передаваемой по независимому от системы ДАУ каналу из рулевой рубки на исполнительные механизмы, воздействующие непосредственно на рейки ТНВД.
7. Контроль исправности системы.
Дополнительные функции
Система ДАУ должна предусматривать следующие дополнительные функции:
1. Программированный выход ГД на заданный режим — обычно три программы: аварийная, нормальная и замедленная.
2. Три попытки пуска.
3. Прохождение зоны критических оборотов.
4. Возможность экстренных маневров по следующим программам:
Аварийная (экстренная) программа системы дау
Аварийная программа системы ДАУ включается при возникновении опасности для судна, обеспечивая ускорение процессов пуска, остановки и реверсов путем увеличения нагрузки на цилиндро-поршневую группу дизеля. В аварийной программе топливоподача при пуске увеличивается, разрешение подачи контрвоздуха для реверса происходит при повышенных оборотах, программное управление скоростными режимами и защиты при этом отключается (кроме защиты от разноса двигателя).
Требования к системам дау
1. Управление ГД должно быть полностью автоматизировано и осуществляться одной рукояткой без выдержки времени.
2. Ручное управление должно совмещаться с рукояткой машинного телеграфа, но система питания машинного телеграфа должна быть отдельной от системы питания ДАУ.
3. Система ДАУ должна обладать высокой точностью задания оборотов (±1,5%).
4. Система должна обеспечивать резервное управление из машинного отделения, которое может быть автоматическим или ручным дистанционным.
5. Переход на такой вид управления должен происходить не более чем за 10 с.
6. Переключение постов управления осуществляется из машинного отделения.
7. Помимо основного поста управления, в рулевой рубке могут устанавливаться дублирующие посты управления на крыльях мостика.
8. Система ДАУ должна обладать консерватизмом, т.е. в случае нарушения питания заданный режим сохраняется на время не менее 5 минут.
9. При исчезновении питания должно автоматически включаться резервное (аварийное) питание.
Операции, выполняемые при вводе в действие системы дау гд и врш
При вводе в действие системы ДАУ ГД и ВРШ вахтенному механику совместно с вахтенным помощником капитана и электромехаником необходимо выполнить следующие операции:
1. Проверить возможность передачи управления ГД и ВРШ из ЦПУ на пост управления в рулевой рубке и обратно с одновременной проверкой сигнализации.
2. Проверить прохождение команд на изменение хода с каждого из постов управления, а также соответствие положения рукоятки управления системой ДАУ и машинного телеграфа в рулевой рубке и в ЦПУ.
3. Проверить синхронную связь между выносными постами ДАУ на крыльях мостика правого и левого бортов и постом управления в рулевой рубке.
4. Сверить показания часов регистратора маневров с судовым временем.
5. До пуска ГД проверить возможность изменения шага лопастей ВРШ с поста управления в рулевой рубке и в ЦПУ.
6. Выполнить пробные пуски ГД с помощью системы ДАУ, обращая внимание на устойчивость частоты вращения, соответствующей самому малому ходу.
7. Выполнение проверок зафиксировать в машинном и судовом журналах.
СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ ГЛАВНЫМ ДВИГАТЕЛЕМ (ДАУ ГД)
Для ГД рыболовных судов, находящихся на промысле, характерна многорежимность их работы, связанная с необходимостью частых изменений мощности, скорости и направления движения судна. Решения об изменении режима работы принимаются судоводителями в зависимости от ситуации, которая складывается на промысле. Требуемые изменения режима выполняются САУ ГД и членами машинной команды так, чтобы были обеспечены необходимые показатели качества регулирования и исключены аварийные режимы.
ДАУ поднадзорна Регистру и должна удовлетворять ряду требований [1]:
1. Быть структурно максимально простой, все изменения режима работы ГД должны выполняться без задержек одной рукояткой, установленной на мостике.
2. Рукоятка управления должна быть совмещена с машинным телеграфом.
3. При наличии нескольких постов управления должна быть обеспечена возможность их параллельного подключения.
4. Регулятор частоты вращения должен быть всережимным, допускающим глубокое регулирование частоты вращения винта.
5. Ошибка регулирования частоты вращения не должна превышать 1,5% от номинальной частоты.
6. Иметь не менее трёх программ управления ГД: нормальную, аварийную и плавного разгона.
8. Обеспечивать качество пуска на уровне квалифицированного ручного пуска.
9. Обеспечивать возможность перехода на ручное управление за время не более 10 с.
10. Иметь защиту ГД по максимальной и минимальной подаче топлива, что, соответственно, исключает перегрузку дизеля и не даёт ему заглохнуть.
11. Иметь защиту ГД по состоянию вспомогательных механизмов (питательных насосов, насосов смазки и т.д.).
12. Иметь достаточно развитую систему контроля состояния всех элементов ДАУ ГД и сигнализации.
13. Быть устойчивым к прекращению электропитания.
Наилучшими по многим показателям являются ДАУ ГД на основе микропроцессоров, которые:
· позволяют реализовать оптимальные законы и алгоритмы управления ГД (для судовых микропроцессорных САУ практически не существуют ограничений на сложность алгоритма управления);
· позволяют, при необходимости, просто вносить изменения в алгоритм управления, так как выполняется это путём изменения содержания программы, записанной в памяти микропроцессорной системы управления, без изменения аппаратной части;
· имеют развитую систему самоконтроля и самодиагностики с выводом сообщений в виде текста.
 Функциональная схема ДАУ ГД приведена на рис.28.1.
Функциональная схема ДАУ ГД приведена на рис.28.1.
На схеме показано два ГД, которые могут работать в параллель через редуктор Р. Подключаются ГД1 и ГД2 к редуктору через пневмомуфты ПМ1 и ПМ2. Главный вал подключается к редуктору через пневмомуфту ПМ3. На валу имеется гидротормоз вала ГТВ. С помощью механизма изменения шага МИШ поворачивают лопасти винта. К главным двигателям обычно подключены валогенераторы ВГ1 и ВГ2. Один из валогенераторов постоянного тока и к нему подключается траловая лебедка, которая содержит двигатель постоянного тока. Другой валогенератор переменного тока, к нему подключены неответственные потребители, которые не поднадзорны Регистру. Использование валогенераторов позволяет эксплуатировать главные двигатели с максимальным КПД при всех возможных нагрузках на главном валу.
Для управления ГД предусмотрено 3 поста управления: Мостик, ЦПУ и МО. Управление из главного распределительного щита (ГРЩ) вводится временно только при аварии на судовой электростанции. В ДАУ ГД реализованы следующие функции управления:
1. Дистанционный пуск/остановка ГД1 и ГД2 из ЦПУ.
2. Дистанционное управление пневмомуфтами ПМ1 и ПМ2 из ЦПУ и МО.
3. Дистанционное управление пневмомуфтой ПМ3 и гидротормозом вала ГТВ из ЦПУ, МО и с мостика.
4. Дистанционное регулирование частоты вращения w с трёх постов:
· из ЦПУ в режиме раздельного регулирования частоты w в диапазоне 90-100% с целью равномерного распределения нагрузки между ГД1 и ГД2;
· из МО в режиме раздельного регулирования частоты w в диапазоне 50-100% с целью равномерного распределения нагрузки между ГД1 и ГД2;
· из секции управления ГРЩ в случае, когда из-за дефицита мощности главных генераторов судовой электростанции (например, при внезапном аварийном отключении генератора защитой или остановке дизеля) требуется подключение параллельно к судовой сети (к шинам ГРЩ) валогенератора переменного тока. В этом случае вахтенный электромеханик вручную подгоняет частоту валогенератора к частоте сети 50 Гц и затем вручную поддерживает частоту на установленном уровне в течении времени ликвидации аварии на судовой электростанции. Регистром не предусматривается постоянная работа валогенератора на судовую сеть, так как частота вращения главного двигателя должна изменяться в больших пределах, что требуется для эффективного решения задач судовождения.
5. Дистанционное управление механизмом изменения шага (МИШ) винта с мостика.
6. Дистанционное аварийное управление шагом винта из ЦПУ при помощи гидросистемы запасного управления МИШ.
7. Экстренная ручная остановка ГД1 и ГД2 с отключением всех пневмомуфт из ЦПУ.
8. Принудительная блокировка защиты по аварийному давлению смазки ГД с помощью переключателей, находящихся на мостике и в ЦПУ.
9. Автоматическая разгрузка ГД путём уменьшения шага винта при возникновении перегрузки ГД от ВГ1 и ВГ 2.
10. Автоматическое ограничение установленной в пределах 65-100% нагрузки ГД путём ограничения подачи топлива и уменьшения шага винта.
11. Автоматическая защита каждого ГД по предельной частоте и состояниям вспомогательных механизмов с отключением всех пневмомуфт.
12. Автоматическая защита всех пневмомуфт по трём параметрам:
· низкое давление воздуха в системе;
· аварийное давление масла смазки редуктора;
· исчезновение напряжения на шинах судовой сети.
Дата добавления: 2018-11-24 ; просмотров: 329 ; Мы поможем в написании вашей работы!
БЛОГ ЭЛЕКТРОМЕХАНИКА
Блог судового электромеханика. Электроника, электромеханика и автоматика на судне. Обучение и практика. В помощь студентам и специалистам
07.10.2015
Системы ДАУ главными двигателями
Системы ДАУ главными двигателями относятся к числу основных систем автоматизации.
В состав дизельной установки входят сам дизель и системы, обеспечивающие его функционирование, — системы пуска, реверса, смазки, охлаждения, топливоподачи, наддува, управления.

Безаварийная и экономичная работа дизельной установки возможна при условии автоматического контроля и управления основными рабочими параметрами дизеля.
К рабочим параметрам, по которым осуществляется автоматическое регулирование, защита и сигнализация, относятся: температура атмосферного воздуха Т0, наддувочного воздуха во впускном коллекторе Тк, выпускных газов по цилиндрам и средняя за газовой турбиной Tг, пресной воды на входе Oв1 и на выходе Ов2, смазочного масла на входе Ом1 и на выходе Ом2; давление атмосферного воздуха р0, воздуха во впускном коллекторе рк, смазочного масла рм, газов в выпускном коллекторе рг, охлаждающей воды рв; крутящий момент М и частота вращения n коленчатого вала. На рис. 1 представлена обобщенная схема автоматического контроля и регулирования дизеля.
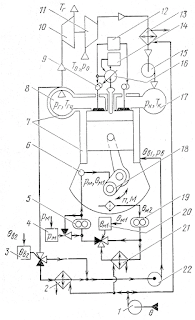
Контроль за температурой и давлением осуществляется через соответствующие датчики. Для управления величинами крутящего момента и частоты вращения коленчатого вала служит общий регулирующий орган — топливодозирующая аппаратура дизеля. Причем в установившихся режимах работы регулятор частоты вращения поддерживает заданный скоростной режим, изменяя подачу топлива на цикл в соответствии с изменением нагрузки на дизель.
Несмотря на взаимное влияние основных рабочих параметров, большая инерционность дизеля по отношению к взаимосвязанным параметрам позволяет создавать системы их несвязанного регулирования.
Системы автоматизированного управления дизельными установками обеспечивают автоматическое выполнение как минимум следующих операций: пуск, вывод на заданный скоростной режим, остановку, реверс. В общем виде структура системы может быть представлена схемой, показанной на рис. 2.
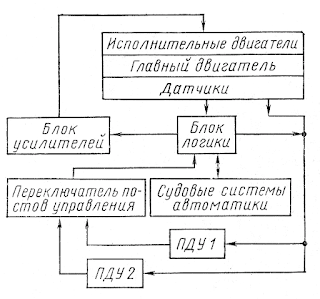
В состав системы входят два поста дистанционного управления: ПДУ1— в ЦПУ машинного отделения; ПДУ2 — в рулевой рубке. В ПДУ1 размещена аппаратура дистанционного контроля рабочих параметров и состояния механизмов, систем и устройств, а также предусматривается возможность подачи всех команд. В ПДУ2 размещены аппаратура сигнализации только о состоянии основных механизмов и устройств, приборы контроля рабочих параметров, определяющие режим движения судна (частоту вращения гребного вала) и командные органы для изменения режима движения судна.
В блоке логики вырабатываются командные сигналы на базе анализа сигналов, поступающих с ПДУ, систем судовой автоматики и различных датчиков, контролирующих состояние объекта управления (дизеля). Командные сигналы от блока логики после усиления поступают в цепи управления работой исполнительных двигателей, воздействующих на регулирующие органы. В блоке логики размещают ряд субблоков, каждый из которых обеспечивает только одну операцию управления, согласно заложенной в нем программе.
Для построения функциональных устройств в системах ДАУ применяют: в устройствах логики — пневматические и электронные элементы; исполнительные двигатели — электрические, гидравлические, пневматические; в цепях управления — электрические и пневматические элементы; в системах сигнализации — электрические элементы.
Отечественная система ДАУ ДКРН, предназначенная для дистанционного автоматизированного управления дизелями 5ДКРН 50/110 и 6ДКРН 74/160, отвечает требованиям Регистра и выполняет следующие операции: управление главным двигателем с любого из двух дистанционных постов управления (ЦПУ и рулевой рубки); пуск двигателя по программе; реверс двигателя при подаче контрвоздуха по двум переключаемым программам (нормального и экстренного реверса); исполнение команд управления двигателем по положению топливорегулирующей рукоятки; прекращение подачи топлива в двигатель при падении давления масла ниже 0,8 кгс/см 2 ; прохождение зоны критической частоты вращения; прекращение подачи пускового воздуха и топлива, если при пуске двигатель в течение 5—7 с не достигнет минимально устойчивой частоты вращения повторных пусков при включении программы экстренного реверса; постепенный вывод двигателя на режим полного хода в течение 2 ч; сохранение заданного режима работы двигателя при исчезновении пневмо- и электропитания; защиту двигателя от опрокидывания (самопроизвольный запуск дизеля в направлении, противоположном заданному); контроль правильности функционирования блоков системы.
Каждая операция управления выполняется по программе, заложенной в соответствующем субблоке блока логики. Информация о состоянии дизеля и органов управления, необходимая для реализации программы управления, вырабатывается основными датчиками: положения рукоятки реверса, положения пускотопливной рукоятки, положения распределительных валов, частоты вращения и направления вращения коленчатого вала.
Для автоматического управления автономными вспомогательными механизмами, обслуживающими главный дизель и дизель- генераторы, служит система «Торнадо».
На судах отечественного флота применяют следующие типы систем ДАУ: FAHM (фирма АСЕА, Швеция); BMS = 930 (фирма STL, Дания); ZSPN (фирма «Цегельски», Польша) и др.
Назначение, классификация и основные типы систем ДАУ ГД
Системы дистанционного автоматизированного управления главными двигателями предназначены для автоматизации процессов управления ГД при пуске, реверсе, изменении режимов работы с мостика с помощью одного органа, обычно совмещенного с рукояткой машинного телеграфа. Степень автоматизации процессов управления должна быть такой, чтобы задание режимов производилось рукояткой управления перемещением в любое положение с любой скоростью без выдержек в промежуточных положениях. Все промежуточные операции по выводу ГД на заданный режим выполняются автоматически. Этим ДАУ отличается от дистанционного управления, где по существу повторяются способы и последовательность местного ручного управления с помощью органов, отнесенных только на некоторое расстояние от ГД.
Первая система ДАУ мощным судовым дизелем была установлена в 1961 г., однако широко применять такие системы начали в 1963 г. В настоящее время системы ДАУ разработаны для всех типов судовых ГД и устанавливаются на дизелях любой мощности. Системы ДАУ обладают рядом экономических и эксплуатационных достоинств, к которым следует отнести:
— освобождение вахтенного механика от необходимости находиться у поста управления ГД как при маневрировании, так и на установившихся режимах работы, уменьшение трудозатрат на управление и создание предпосылок для новой организации вахтенной службы в машинном отделении, службы операторов в ЦПУ;
— непосредственное управление движением судна с мостика улучшает качество процесса маневрирования за счет сокращения времени передачи и исполнения команд и отсутствия промежуточного звена – вахтенного механика, обеспечения четкости и стабильности в отработке команд, плавного изменения скоростного режима ГД и получение любой требуемой скорости судна;
— уменьшение затрат на ремонт силовой установки за счет сокращения числа маневренных операций – пусков и реверсов; обеспечение защиты ГД от перегрузок, исключение работы в зоне критической частоты вращения и других возможных ошибочных операций по управлению; программированием пусков, реверсов и нагрузочных режимов создаются лучшие, чем при ручном управлении, условия работы ГД в динамических режимах; уменьшается износ ГД, а следовательно, увеличивается его моторесурс; уменьшается вероятность аварийности ГД.
Основные требования Регистра РФ к системам ДАУ:
— эффективное исполнение команд с мостика с учетом состояния установки;
— точное регулирование частоты вращения гребного вала при изменениях режима работы (мощности) ГД на маневрах;
— обеспечение полной мощности заднего хода одним движением рукоятки ПУ;
— снятие блокировок и ограничения скорости нагружения дизеля при аварийном маневре;
— возможность в любое время передать управлением дизелем с мостика в МО в случае выхода из строя системы управления.
Системы ДАУ включают в себя стоп-устройство аварийной остановки, питающееся от независимого источника (аккумуляторной батареи) и имеющее независимую связь с постом управления на мостике, а также систему автоматической регистрации маневров (реверсограф).
Четкую классификацию систем ДАУ из-за их многообразия и использования элементов различной физической природы трудно привести. Они могут быть классифицированы по признакам, присущим тем или иным системам.
По роду энергии, применяемой в системах ДАУ, различают электрические, гидравлические, пневматические и комбинированные.
Электрические (релейные, электронные, микропроцессорные) системы обладают высоким быстродействием, экономичностью и большой точностью, способны передавать и дублировать команды с большим усилением на неограниченные расстояния. Системы компактны, для них не требуется специальных помещений. Недостатки систем определяются в основном степенью надежности их элементов, особенно низкая надежность у релейных систем, которые чувствительны к вибрациям и ударам. Микропроцессорные системы (МКПС) более надежны, однако они достаточно дорогие и для их обслуживания требуется высококвалифицированный персонал со специальной электротехнической подготовкой.
Гидравлические системы ДАУ ГД передают сигналы на 80—100 м достаточно точно, развивают большие усилия, компактны, оперативны. К недостаткам такой системы следует отнести чувствительность к проникновению воздуха в рабочие жидкости и изменению температуры окружающей среды, необходимость в запасах рабочих жидкостей и возвратных трубопроводах, пожаровзрывоопасность некоторых рабочих жидкостей, а также сложность проверки и ликвидации повреждений трубопроводов.
Пневматические системы ДАУ ГД на универсальных элементах пневматики передают команды управления на 200—250 м, просты, компактны, точны, обладают большим ресурсом, ремонтопригодны, не имеют возвратных коммуникаций. Ошибки, допущенные при их обслуживании, не приводят к опасным ситуациям и выходу их из строя.
Быстродействие относительно невелико, но достаточно для судовых условий. Недостатком пневматических систем ДАУ является зависимость качества их работы от изменения температуры окружающей среды, чистоты и влажности силового и командного воздуха. На практике широко применяются, в том числе и на отечественных судах, пневмоэлементы фирмы «Вестингауз» (США).
Наиболее эффективны комбинированные системы ДАУ ГД. Они позволяют реализовывать сложные алгоритмы управления и развитые логические и вычислительные функции. Для получения командных сигналов в таких системах применяются пневматические и электронные элементы, а для силовых — электрические, гидравлические и пневматические элементы. Тип системы ДАУ, как правило, определяется видом энергии, используемой в логической части, в системе автоматики.
В настоящее время элементы логики, дистанционные связи, цепи сигнализации и элементы контроля в основном электрические (электронные).
В качестве силовых механизмов обычно применяются пневматические серводвигатели (сервомеханизмы) в цепях управления пуском, реверсом, топливоподачей, остановкой. Гидравлика (масляная) применяется для перемещения органов штатной системы управления ГД: реверсирующего золотника, реверсивных серводвигателей, распределительного вала (РВ), воздухораспределителя (ВР) и др. Учитывая наличие практически всех видов энергии, можно говорить об электропневматических, пневмогидравлических, пневматических, электрических системах ДАУ ГД.
По способу привязки к двигателям различают систем и ДАУ навешенного (универсального) и встроенного типа. Системы навешенного типа подключаются к наружным штатным органам управления дизелем; конструкция штатной пуско-реверсивной системы ГД практически не изменяется. В системах встроенного типа автоматизация процесса управления осуществляется в значительной степени за счет внутренних свойств объекта путем соответствующего изменения его штатной системы управления.
По характеру взаимодействия со штатной пуско-реверсивной системой ГД различают системы зависимого типа, включаемые последовательно со штатной системой, и независимого типа, включаемые параллельно штатной системе. В них дублируются все блокировки штатной системы управления ГД.
По гибкости структуры и объему исполняемых функций – гибкие, у которых объем и номенклатура функций могут изменяться в зависимости от требований, что обычно возможно в универсальных системах, и негибкие, с установленным объемом функций (обычно встроенные системы).
В соответствии с требованиями Регистра РФ, сформулированными на основе опыта эксплуатации, системы ДАУ ГД должны быть электропневматическими или электрическими (электронными, с МКП техникой), совмещаемыми, гибкими, независимого типа, навешенными.
Статическая ошибка систем ДАУ ГД не должна превышать 1,5 % номинальной частоты вращения. Переключение управления с мостика в ЦПУ, т. е. переход с автоматического на дистанционное управление, должно быть простым, а время перехода не более 10 с.
Кроме основного электропитания в системах ДАУ предусматривается независимое автономное питание. При возникновении перерыва питания в системе сохраняются имеющиеся установки и режим работы, которые возобновляются после ликвидации аварийного режима.
Серийные отечественные системы ДАУ ГД стали устанавливать на судах в 1962 г. Это были пневматические и электропневматические системы, в которых использовались магнитные усилители и электронные элементы. В настоящее время на судах типа «Капитан Гаврилов», «Харитон Греку», «Академик Благонравов» и др. эксплуатируется электропневматическая отечественная система ДАУ ГД «ГРОМ» и «ГРОМ-М».
На многих судах установлены различные типа ДАУ зарубежных фирм.
Ведущими к этой области являются фирмы Швеции — «Jungner Instrument» (электрические системы типа FAHМ модификаций 1—5, 2, 2—5, 1—6); ASEA (микропроцессорная система FAHM-S); Германия — «Funkwerk Kopenik» (электронные системы типа AFD модификаций I, III); Польши.— «РКА — Meramant» (системы типов USSG модификаций I,II, II—I; UZS модификаций В2, Т2; ZSPN модификаций 21, 22, 23, 23-A; OSM-4); Дании — STL (электропневматические системы типа BMS модификаций 890, 930); Италии — FIAT (электропневматические системы «Пилотрон-Д», SEPA — модификаций 6701, AN-102/105; S-794-A267); Норвегии (электрическая система AUTRONICA-II) и Японии (электрическая система We-2).
Вопросы для самопроверки:
1. Назначение дистанционной автоматизированной системы
управления главных двигателей ДАУ ГД.
2. Какие системы ДАУ применяют на современных ГД?
3. Какие действия предусматривает алгоритм автоматизированного
4. Что означает время реверса и каков диапазон их значений?