Для чего промышленным дронам нужен модуль RTK

С дроном RTK геодезисты и другие пилоты промышленных беспилотников могут рассчитывать на сантиметровую точность позиционирования при каждом полете. RTK представляет собой более точную систему по сравнению со спутниковыми данными и может помочь вам получить точную информацию, необходимую для выполнения работы.
Что такое RTK
С дроном RTK геодезисты и другие пилоты промышленных беспилотников могут рассчитывать на сантиметровую точность позиционирования при каждом полете. RTK представляет собой более точную систему по сравнению со спутниковыми данными и может помочь вам получить точную информацию, необходимую для выполнения работы.
Основные элементы комплекса RTK включают:
Преимущество RTK
Данные RTK намного точнее спутниковых данных, благодаря им можно строить 2D и 3D-карты, ортофотопланы с погрешностью меньше сантиметра. При спутниковой навигации есть множество факторов, которые могут исказить координаты, в том числе погодные условия, высокие здания, горы и другие проблемы. Это называется «тропосферными задержками». Система RTK же заполняет эти пробелы данными в реальном времени с базовой станции и дрона.
Модуль RTK для Mavic 2 Enterprise Advanced
Основные преимущества системы RTK:
Разница между аналогичными дронами с RTK и без него поразительна. В одном недавнем исследовании DJI и DroneDeploy сравнили Phantom 4 RTK и Phantom 4 Pro (потребительская версия, не имеющая встроенного приемника RTK) в более чем 30 различных полетах с системой контрольных точек для обследования здания на крыше. Результаты показали, что дрон с функцией RTK значительно лучше рассчитывает горизонтальную и вертикальную точность измеренных точек, а также точность линейных измерений.
Получите максимальную отдачу от оборудования RTK
Если вы ищете систему RTK, которая будет надежна для каждого полета, вам понадобится промышленный дрон от DJI. Наши системы RTK используют дрон-модуль и высокоточную мобильную станцию GNSS. Независимо от того, решите ли вы полностью полагаться на RTK, использование дрона DJI означает, что вы можете рассчитывать на то, что всегда будете иметь точные данные, независимо от задачи.
Некоторые из лучших дронов с функцией RTK от DJI включают в себя:
Здесь вы найдете идеальный дрон-геодезист для локальных задач. Благодаря модулю RTK этот беспилотник обеспечивает точность горизонтального позиционирования 1 см + 1 ppm, точность вертикального позиционирования 1,5 см + 1 ppm и абсолютную горизонтальную точность фотометрических моделей в пределах 5 см. Дрон также хранит данные спутниковых наблюдений, которые будут использоваться для PPK с сервисом DJI Cloud PPK.
Коммерческая полетная платформа Matrice 300 РТК подчеркивает усовершенствованную систему позиционирования RTK с расширенными возможностями искусственного интеллекта. Добавьте к этому максимальное время полета 55 минут, заменяемые в «горячем» режиме батареи и широкий диапазон рабочих температур, и вы получите дрон, готовый к любой работе и задачам.
Этот компактный складной дрон оснащен встроенным двойным сенсором на 48 МП с тепловым разрешением 640×512 пикселей. Его присоединяемый модуль RTK позволяет этому дрону выполнять точные и повторяемые инспекционные миссии. Это мощное портативное решение с временем полета до 31 минуты.
РТК – режим для GNSS-оборудования. Всё, о чём вы не постеснялись спросить!
Целью данной статьи является попытка разобраться в специфике данного режима работы GNSS-оборудования, геометрической сути такой методики, рассмотреть виды геодезических работ, где возможен и эффективен режим реального времени и какое оборудование для этого может понадобиться. Множество вопросов в службу технической поддержки на эти темы свидетельствует об актуальности такого «ликбеза», несмотря на весьма древнее происхождение методик реального времени в спутниковой геодезии. В связи с активным развитием в последние годы средств коммуникации и спутниковых сетей базовых станций роль режима реального времени многократно возросла, а в ряде работ стала полностью доминирующей.
Геометрическая и физическая сущность режима реального времени
Начнем, пардон, «от печки»… Как известно, одиночный спутниковый прибор любого класса в силу влияния большого количества негативных факторов высокую точность позиционирования не обеспечивает. Во всяком случае точность геодезического уровня. Поэтому при использовании в геодезических работах спутниковых приборов реализован разностный метод определения координат объектов, т.е. по взаимному положению двух точек. В каждой из них находятся приёмники, принимающие сигналы от спутников нескольких GNSS-систем. Один из них расположен на точке с известными координатами – он считается опорным (базовым). Другой, подвижный (ровер) перемещается по точкам, координаты которых требуется определить. В ходе обработки взаимное положение между такими точками может быть в значительной степени исправлено и, соответственно, существенно повышена точность координирования.
Существует два фундаментальных способа работы:
В первом случае все приемники работают автономно и никакой связи между собой не имеют. Важно только, чтобы регистрация измерений производилась одновременно, т.е. на определённом интервале времени выполнялся приём сигналов от одного и того же созвездия спутников. Записанные таким образом данные поступают на совместную обработку в специальное офисное программное обеспечение, которое решает две основные задачи:
Суть её заключается в присвоении исходной базовой точке известных координат в соответствующей системе отсчета и определении, по компонентам пространственного вектора, координат точки подвижной (определяемой) относительно вновь введённых истинных координат опорной точки.
Поскольку обсуждение подробностей данного режима выходит за рамки данной статьи отметим только, что это наименее оперативный, но и наиболее точный режим работы за счет возможности в течение долгого времени накапливать большие массивы измерений. Это позволяет в процессе обработки добиться максимальной компенсации погрешностей и получить точность координат на уровне миллиметров.
Данный режим, известный под названием «Статика» («Быстрая статика») используется при сгущении геодезических опорных сетей, развитии съёмочного обоснования, опорных базисов и других твердых пунктов. Этот же режим для съёмочных работ в более оперативном варианте называется «Стой-Иди» («Stop and Go») и тоже подразумевает постобработку в офисном ПО.
Во втором случае хоть и выполняются все те же действия: решение вектора между двумя приемниками и дифференциальная коррекция, но реализованы они совершенно иначе. Мало того, что вся обработка происходит в реальном времени, непосредственно в полевом компьютере (контроллере), между приемниками необходимо наличие надежного канала связи для обмена данными. Все настройки, управление съёмкой, обмен данными и регистрацию результатов обеспечивает полевое программное обеспечение, функционал и удобство которого во многом определяют успех оборудования у пользователей. Варианты способов коммуникации между приемниками и необходимое для этого оборудование мы рассмотрим в следующих разделах.
Поскольку данный режим позволяет оперативно, непосредственно на объекте работ получать готовые координаты точек, то он преимущественно используется для съёмочных работ и для выноса в натуру (разбивки) точек и называется «Кинематикой в реальном времени» или RTK.
Как же это работает?
При запуске съёмки на опорном (базовом) приёмнике в полевом ПО необходимо указать точные известные координаты для данной точки в соответствии с ранее назначенной проекту системой отсчета (системой координат). В последующем ПО имеет возможность сравнить текущее приближённое решение с известными значениями и сформировать разности координат для базовой точки. Эти разности в народе именуют «поправками», которые базовый приёмник и отправляет на подвижный (ровер) по тому или иному каналу связи. На самом деле в составе корректирующей информации кроме «поправок» передаётся гораздо больше данных, вплоть до параметров системы координат, но сейчас на этом заострять внимание не будем.
Подвижный приёмник, работая недалеко от базовой станции (до нескольких десятков километров), находится приблизительно в равных с базой условиях приёма спутниковых сигналов и имеет близкий к ней уровень погрешностей определения координат. Таким образом ПО контроллера, находящегося на подвижном приёмнике, приняв корректирующую информацию от базы имеет возможность исправить результаты своей работы в реальном масштабе времени.
Если в проекте полевого контроллера верно произведена настройка системы координат и на объекте обеспечен надёжный канал доставки корректирующей информации, то можно сказать, что ровер выдает сразу готовые точные координаты. Это позволяет выполнять как оперативные съёмочные работы, так и вынос в натуру (разбивку) различных объектов.
Важно отметить, что наличие одного лишь сервиса предоставления корректирующей информации от базовой станции без привязки к местным исходным пунктам геодезической сети и правильной настройки рабочей системы координат не может обеспечить высокоточное абсолютное позиционирование.
Вопросы использования проекций, настройки в контроллере систем координат, в том числе условных локальных, а также применения процедуры калибровки (локализации) района работ заслуживают рассмотрения в отдельной статье.
Каналы связи для режима RTK
Теперь о связи. Сам по себе режим RTK никак не зависит именно от способа коммуникации. Важно, чтобы связь была стабильна на необходимом расстоянии от базового приёмника до ровера. На современном этапе можно выделить четыре категории средств доставки «поправок» к подвижному приёмнику:
В зависимости от условий и специфики работ выбирается тот или иной вариант или их комбинация. Соответственно имеется широкий выбор оборудования в дополнение к основному комплекту приёмник-контроллер.
Кстати о комплектах. В зависимости от используемой технологии комплект может включать от двух и более спутниковых приёмников, включая базовый, плюс оборудование для связи. И наоборот, в связи с бурным развитием сетей опорных базовых станций, комплект может состоять из компактного ровера-моноблока с полевым ПО в смартфоне или даже одно комбинированное устройство в конструктиве наладонного накопителя…
Использование УКВ (UHF) диапазона
Исторически раньше всего на службе RTK использовались радиомодемы УКВ-диапазона. Корнями этот способ связи уходит в береговые сервисы для морской навигации и до сих пор незаменим в регионах, не обеспеченных надежным покрытием сотовой связи. В настоящее время используются устройства, работающие в основном в диапазоне частот 400-470 МГц с мощностью передачи от 0.5 до 30-40 Вт.
Приёмник может иметь встроенный в свой корпус маломощный радиомодуль и компактную УКВ-антенну. В зависимости от условий распространения радиосигнала на объекте дальность обслуживания может составлять от сотен метров до нескольких километров.
Мощные радиомодемы – это отдельные устройства с радиаторами охлаждения и самостоятельными аккумуляторными блоками питания. В комплект таких модемов входят антенны различных габаритов и конструкций, устройства для их установки, кабели различной длины, сечения и назначения, а также вспомогательные аксессуары. На равнинной открытой местности мощные радиомодемы обеспечивают дальность обслуживания до нескольких десятков километров.
Практически все радиомодемы умеют работать в режиме ретранслятора (репитера), что позволяет дополнительно расширить зону обслуживания RTK, а также обеспечить работу на территории со сложным рельефом или при наличии препятствий.
Использование голосовой связи GSM
Бурное развитие сетей сотовой связи позволило кардинально расширить возможности спутникового оборудования в режиме RTK. Дальность взаимодействия стала регламентироваться лишь охватом территории сотовыми сетями и методическими ограничениями спутниковых технологий. Габариты оборудования связи ужались до размеров смартфонов и гнезд для SIM-карт. Поскольку для взаимодействия спутниковых приборов используются голосовые каналы сотовой связи работа тарифицируется как обычный разговор двух абонентов, а на тарифе необходима соответствующая услуга пакетной передачи данных. Для настройки связи достаточно роверу указать мобильный номер базы, что не в пример проще, чем согласовать целый ряд настроек для УКВ-модемов.
Использование Интернет соединения (GPRS)
Следующим шагом стало развитие Интернет-технологий связи. У базовых приемников появилась возможность вещать корректирующую информацию в сеть Интернет. А для подвижных приёмников стал доступен многопользовательский доступ к этим данным. В отличие от GSM-связи «точка-точка» протокол NTRIP предоставляет множеству пользователей индивидуальные идентификаторы и пароли для безопасного RTK-подключения к источнику «поправок» в сети Интернет.
Выход в Сеть обеспечивается посредством всё тех же SIM-карт сотовых операторов, а малый трафик и доступные тарифы гарантируют меньшие затраты на связь в геодезическом производстве.
Возможность организации взаимодействия между базовыми приёмниками позволила развивать сетевые RTK-технологии, объединяя базовые станции в пределах целых регионов. Это позволило обеспечить высокоточными геодезическими измерениями большие территории с однородной системой отсчета.
Сети базовых станций. Технология VRS
О сетях постоянно действующих базовых станций (ПДБС) стоит поговорить отдельно. Если такая сеть присутствует в регионе предстоящих работ, то это мощный инструмент для использования технологий RTK. Кроме этого базовые станции по умолчанию регистрируют «сырые» GNSS-данные и всегда могут быть использованы при постобработке собственных статических измерений пользователей спутниковой геодезической аппаратуры. Базовые станции (БС) – это комплекты спутниковых приёмников модульной конструкции, стационарно расположенные на охраняемых объектах, например, офисных зданиях, где им обеспечены хорошие условия обзора небосвода и стабильный выход в сеть Интернет. Проект сети (места установки одиночных базовых станций) разрабатывается заранее с соблюдением геометрических требований к ее конфигурации. Кроме обеспечения коммуникационных возможностей базовая станция должна быть оснащена специальным сетевым программным обеспечением.
Являясь одним из компонентов разностного спутникового решения стационарная базовая станция позволяет пользователю, имея лишь одиночный комплект GNSS-приёмника (сетевой ровер), успешно выполнять широкий спектр высокоточных геодезических работ на расстояниях в десятки километров от неё.
Однако, имеется важный нюанс. Сама по себе одиночная базовая станция, передавая корректирующую информацию, обеспечивает лишь одну составляющую RTK-технологии – точное позиционирование ровера относительно точки установки антенны БС. Если эта точка изначально не привязана относительно местной опорной сети геодезических пунктов в соответствующей системе координат, то и координаты ровера данной системе отсчета соответствовать не будут.
Базовые станции будучи объединены в сеть позволяют максимально гибко использовать возможности RTK, обслуживая роверы на минимальном их удалении от баз. Венцом сетевых возможностей является технология VRS – виртуальных базовых станций. Станции сети объединены каналами связи и управляются из единого центра. Специальное сетевое программное обеспечение на основе данных приёмников сети может смоделировать результаты измерений в любом месте территории, охваченной сетью, и сформировать поток «поправок» от данной точки. Ровер, передав сведения о своём местоположении, получает решение от смоделированной рядом виртуальной БС. Это гарантирует высокую точность работы в любом месте сети.
Глобальные и облачные сервисы
Ну и наконец несколько слов о глобальных сетевых решениях для обеспечения режима RTK.
Глобальный дифференциальный сервис известен давно и основан на расчетах не по фазе несущей спутникового сигнала, а по коду. Точность позиционирования не высока – от полуметра до полутора метров. Называется такой режим – DGPS. Это уже не грубый навигатор, но и до геодезического уровня еще далеко. Тем не менее такой точности достаточно не только для решения навигационных задач, но и, например, для сбора данных об объектах местности для ГИС. Корректирующая информация передается по тому же спутниковому каналу в L-диапазоне, а формируется она на основе данных глобальной (общемировой) сети базовых станций.
Современная реализация глобального дифференциального сервиса позволяет получить субдециметровую точность координат одиночным роверным приёмником если имеется подписка на данную услугу. Примером такой службы является Trimble CenterPoint RTX. «Поправки» могут передаваться как по спутниковому каналу, так и через Интернет. В течении получаса инициализации точность позиционирования сходится к 4 см и даже лучше в любом месте зоны покрытия данного сервиса.
«Вишенкой на торте» глобальной RTK-технологии стала система Trimble Catalyst. Это пример, так называемой, концепции «Позиционирование как услуга». Комплект включает компактную недорогую спутниковую антенну и устройство на ОС Android с ПО. Несколько вариантов подписки на глобальный сервис обеспечивают различные уровни точности в зависимости от задач – от метровой до сантиметровой.
Примером облачной глобальной службы является Spectra Precision Central. При наличии активной лицензионной поддержки ПО контроллера можно зарегистрироваться на сервере службы и получить доступ к облачному сервису для приёмников Spectra Geospatial.
В заключении
Итак, мы рассмотрели основные аспекты теоретических основ и аппаратной реализации такого современного и эффективного метода спутниковых геодезических измерений как Кинематика реального времени (RTK). Развитие современных средств коммуникации позволило значительно расширить его возможности и обеспечить геодезические работы гибким и высокоточным инструментарием.
Для получения подробной информации по всему спектру геодезического оборудования обращайтесь к менеджерам и службе технической поддержки компании «Геодезия и Строительство».
RTKLib – Сантиметровая точность GPS/ГЛОНАСС в пост-обработке
К сожалению, я не нашел на Хабре упоминаний о замечательной библиотеке для обработки сырых измерений – RTKLib. В связи с этим рискнул написать немного о том, как с её помощью можно получить сантиметры в относительной навигации.
Цель простая – обратить внимание общественности.
Сам я только недавно начал работать с этой библиотекой и был поражен её возможностями для простых смертных. В интернете достаточно много информации о практических примерах, но хотелось попробовать самому — и вот результат.
Итак, процесс в общем виде выглядит следующим образом:

Допустим, у нас есть два ГЛОНАСС/GPS приемника, с которых мы умеем получать сырые измерения (raw data). Сырыми они называются потому, что являются первичным материалом для обработки – псевдодальности, доплер, фазовые измерения…
С помощью утилиты STRSVR из состава библиотеки RTKLib нам необходимо записать два потока данных – один от базовой станции, которая будет неподвижно стоять, и второй – от ровера, который планируем перемещать. Запись от базы желательно стартовать заранее, минут за 10-15 до записи ровера.
В моем случае база находилась на крыше здания, а с ровером выходил на улицу. Для записи использовал два ноутбука.
1) Настраиваем Input – Serial обоих ноутах, это поток от GNSS приемника.
2) Output – File, это будет у нас файл сырых измерений.
3) Пускаем базу на запись – Start и неторопливо идем на открытую местность.
Для небольшой демонстрации распечатал лист А4 с буквой H, которую хотел обвести антенной, точнее основанием под установку на штатив. Антенна TW3440 производства Канадской компании Tallysman с заказной подстилающей поверхностью 30х30 см.
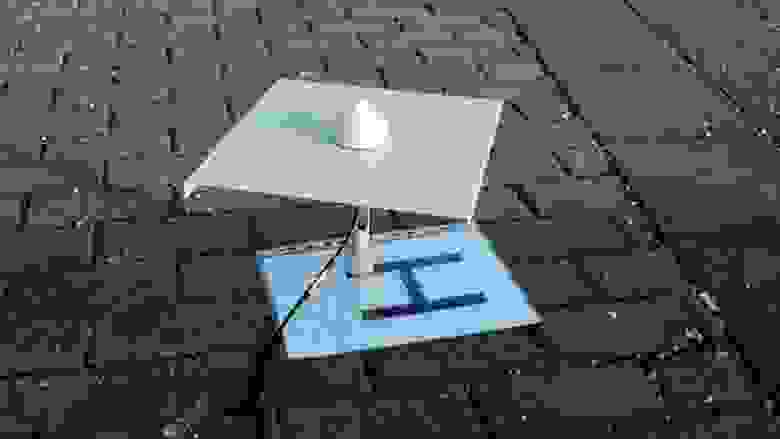
4) Располагаемся на мостовой, ставим ровер на запись и пытаемся медленно обвести буковку. Хоть на ровере стоит частота выдачи 5Гц, лучше уж все сделать тщательно.
5) По окончанию обводки сворачиваемся и идем смотреть что получилось.
6) Скидываем оба файла на один компьютер и приступаем к обработке.
7) Первое – надо из сырых данных получить стандартные RINEX файлы. В этом нам поможет RTKCONV:
8) Указываем путь к файлу с сырыми данными, а так же папку, куда программа поместит RINEX, формат сырых данных, в моем случае это NVS BINR и в настройках ставим галочки GPS и GLO, остальное можно не трогать.
9) Жмем Convert и получаем файлы для ровера и потом для базы, лучше их расположить в соответствующих папках Base и Rover.
10) Далее самое интересное – пост-обработка. Открываем утилиту RTKPOST.
11) Жмем Options, вкладка Settings 1, в настройке режима указываем Kinematic для обработки относительных измерений. Ставим галочки GPS и GLO, можно потом поиграться с настройками.
12) Вкладка Output – можно выставить формат выходных данных, например NMEA.
13) Важный момент – вкладка Positions, тут надо указать координаты базовой станции, либо взять их из заголовка, либо путем усреднения за период записи. Чем точнее знаем координаты базы тем точнее будут абсолютные координаты ровера.
Для примера укажем RINEX Header Position – взять из заголовка файла.
14) Нажимаем ОК и переходим в основное окно, там в поле Rover указываем путь к RINEX файлу ровера, ну и для базы путь к соответствующему файлу. Нажимаем Execute и ждем результат. После обработки можем посмотреть результат, нажав на Plot.
15) Внизу из рисунка видно, что решений с сантиметровой точностью получено 97.3%, остальное — это плавающее решение, точность которого значительно хуже.
Если кому будет интересно, могу написать как реализовать RTK режим.
Так же неплохо бы узнать ваше мнение: в каких не очевидных приложениях можно использовать решения с сантиметровой навигацией?
Сверхточное позиционирование на дороге
Что за GNSS?
GNSS расшифровывается как Global Navigation Satellite System (или Спутниковая Система Навигации) и используется как общий термин для спутниковой локализации с глобальным покрытием по всему земному шару. По состоянию на 2019 год, существует несколько основных спутниковых группировок:
Как это все работает?
Возьмем для примера обычный GPS в нашем телефоне. В зоне видимости с Земли всегда есть как минимум четыре GPS-спутника. Каждый из этих GPS-спутников отправляет информацию о своей позиции и текущее время на GPS-приемники с фиксированным интервалом. Ну а расстояние между GPS-приемником и спутником вычисляется путем нахождения разницы между временем отправки сигнала с GPS-спутника и временем получения сигнала GPS-приемником.
Как только приемник (например, ваш смартфон) получает сигнал хотя бы с трех спутников, вычисляется ваше местоположение (а точнее вашего телефона) с помощью трилатерации. GPS необходимо хотя бы три спутника для вычисления 2D-позиции (долгота и широта) и четыре спутника для 3D-позиции (долгота, широта, высота).
Почему GPS плохо работает в городских условиях?
И хотя под открытым небом GPS работает довольно неплохо, точность сильно падает в городских условиях (ошибка может быть 50 метров и более): высокие здания, провода, мосты и прочие объекты — все это ухудшает точность позиционирования.
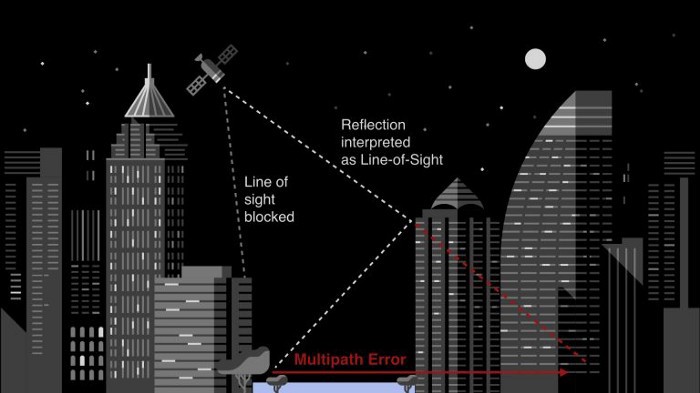
Переотражение спутникового сигнала в городе. Фото Uber
Здания часто мешают прямой видимости спутников, и пока сигнал со спутника «летит» в ваш приемник, он успевает несколько раз отразиться от зданий и прийти с искажением. Из-за подобных переотражений точность позиционирования существенно снижается (бывает ± 500 метров). Вы, наверняка, сталкивались с такой ситуацией, когда при заказе такси ваше местоположение на карте отображалось неправильно.
Чтобы исключить эти проблемы, мы используем высокоточные GNSS-приемники, существенно повышающие точность позиционирования с помощью IMU (инерциальные измерительные модули), информации с CAN-шины автомобиля, RTK-поправок и еще немножко другой магии.
Повышение точности
Существует несколько основных способов повысить точность. Взглянем на самые популярные:

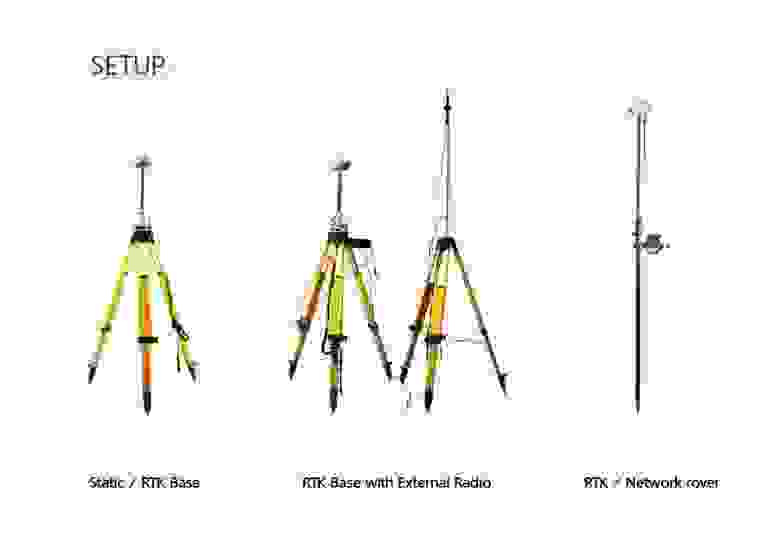
По большому счету, базовая станция — это GNSS-приемник в режиме “станция” + софт + радио/интернет канал
Вы знали, что в нашем OSCAR’e?
OSCAR и высокоточные GNSS-приемники
Сантиметровая точность необходима всем беспилотным автомобилям, не только OSCAR. Представьте на секунду, чтобы было бы, если бы беспилотник использовал обычный GPS с точностью ± 50 метров:
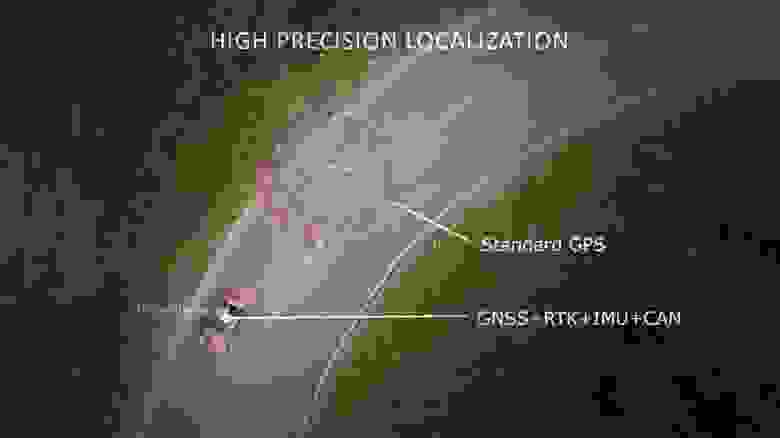
Такая низкая точность однозначно приведет к ДТП. Именно поэтому в процессе работы над OSCAR мы проводили исследования и испытывали ряд GNSS приемников, тестируя их в сложных условиях плотной городской застройки.

Автомобиль один, а GPS-треков несколько
В итоге, мы остановились на двух решениях:
В StarLine мы наслаждаемся тем, что делаем безопасный беспилотный автомобиль реальностью. Если тебе также интересна эта тема и ты хочешь строить беспилотное будущее с нами, то приглашаем в команду!
Проект StarLine OSCAR (Open Source Car) открыт для специалистов из Open Source Community, где все желающие могут поучаствовать в процессе разработки беспилотника на уровне кода, опробовать свои алгоритмы на реальном автомобиле, оснащенном дорогостоящим оборудованием.