По-русски — телеметрия, по-английски — MWD

О.К. РОГАЧЕВ, к.т.н.,
ОАО НПО «Буровая техника» — ВНИИБТ

Наклонно-направленное бурение давно стало основным видом бурения как на суше, так и на море при бурении скважин с платформ различных типов. Одновременно с развитием наклонно-направленного бурения существует тенденция повышения требований к точности попадания забоя скважин в заданную точку и к соблюдению проектного профиля скважины. В связи с этим возникает необходимость обеспечения эффективного контроля пространственного положения ствола скважины. При бурении наклонно-направленных скважин применяется комплекс маркшейдерских работ, включающий специальное оборудование, инструмент, приборы, особые технологические приемы, и связанный как с заданием направления ствола скважины, так и с постоянным контролем за положением оси ствола скважины в пространстве. Последнее является задачей инклинометрии.
Создание телеметрических систем контроля за положением отклоните-ля, забойными параметрами ствола скважины в процессе бурения (включая устройства управления режимами бурения) придало значительный импульс научно-техническому прогрессу в области бурения скважин на нефть и газ. В настоящее время телеметрические системы контроля в сочетании с методико-математичес-ким и программным обеспечением дали технологам небывалые возможности, в корне изменив методы их работы.
Азбука телеметрических систем
В общем случае телеметрические системы осуществляют измерение первичной скважинной информации, ее передачу по каналу связи забой — устье, прием наземным устройством, обработку и представление оператору результатов обработки. Существующие телесистемы включают следующие основные части:
Забойная часть телесистемы включает первичные преобразователи измеряемых параметров, таких как:
К первичным преобразователям направления бурения относятся:
Данные от первичных преобразователей через коммутатор поступают на аналого-цифровой преобразователь (АЦП), затем через кодирующее устройство (КУ), усилитель-передатчик поступают в канал связи. На поверхности закодированная различными способами информация расшифровывается в обратном порядке и поступает на системы отображения и обработки для принятия решений по технологическому режиму.
Каналы связи
На протяжении многих лет основным препятствием для практического использования измерений в процессе бурения был канал связи. Он является основным и решающим фактором, так как именно от него зависит конструкция телесистем, компоновка, информативность, надежность, удобство работы, а также условия прохождения сигналов.
Диапазон существующих в настоящее время каналов весьма широк, и представлен гидравлическим, электромагнитным, акустическим, электропроводным и многими другими типами каналов связи (РИС. 1).
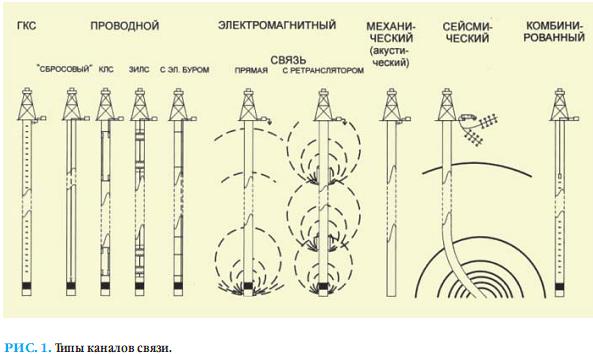
В результате многолетних исследований и практического использования в реальных условиях бурения широкое применение нашли три канала связи:
У каждого из этих каналов связи имеются свои преимущества и недостатки. Разнообразие условий бурения, а также экономическая целесообразность определяют каждому каналу связи свою область применения. Остановимся подробнее на преимуществах и недостатках каждого из рассматриваемых каналов связи.
Электропроводной канал связи (ЭКС)
ЭКС в России в силу многих причин нашел значительное, но недостаточное применение. Этот канал обладает преимуществом перед всеми известными каналами связи — это максимально возможная информативность, быстродействие, многоканальность, помехоустойчивость, надежность связи; отсутствие забойного источника электрической энергии и мощного передатчика; возможность двусторонней связи; не требует затрат гидравлической энергии; может быть использован при работе с продувкой воздухом и с использованием аэрированной промывочной жидкости. К недостаткам электропроводного канала связи относятся наличие кабеля в бурильной колонне и за ней, что создает трудности при бурении; затраты времени на его прокладку; необходимость защиты кабеля от механических повреждений; невозможность вращения колонны (неактуально при применении токосъемника, устанавливаемого под вертлюгом); невозможность закрытия превентора при нахождении кабеля за колонной бурильных труб; необходимость доставки (продавки) забойного модуля или контактной муфты до места стыковки (посадки) при зенитных углах более 60° с помощью прода-вочного устройства (имеются варианты проложения кабеля внутри труб через вертлюг).
Гидравлический канал связи (ГКС)
Телесистемы с ГКС отличаются от других наличием в них устройства, создающего в потоке бурового раствора импульсы давления. Для генерирования импульсов давления в буровом растворе используются несколько различных по типу устройств. Сигнал, создаваемый ими, подразделяется на три вида: положительный импульс, отрицательный импульс или непрерывная волна (РИС. 2).
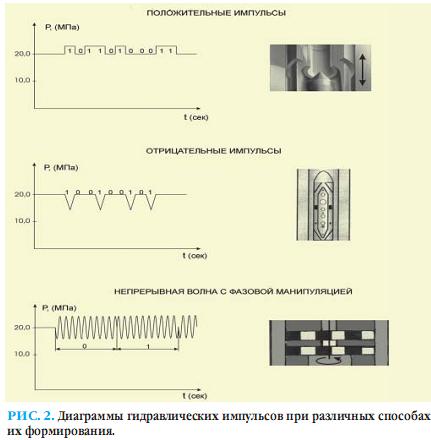
Положительные импульсы генерируются путем создания кратковременного частичного перекрытия нисходящего потока бурового раствора. Отрицательные — путем кратковременных перепусков части жидкости в затрубное пространство через боковой клапан. Гидравлические сигналы, близкие к гармоническим, создаются с помощью электродвигателя, который вращает клапан пульсатора. Гидравлические импульсы со скоростью около 1250 м/с поступают по столбу бурового раствора на поверхность, где закодированная различными способами информация декодируется и отображается в виде, приемлемом для восприятия оператором.
Предпочтение в применении телесистем с ГКС базируется как на относительной простоте осуществления связи по сравнению с другими каналами связи, так и на том, что этот канал не нарушает (по сравнению с ЭКС) технологические операции при бурении и не зависит от геологического разреза (по сравнению с ЭМКС). Недостатки данного канала связи — низкая информативность из-за относительно низкой скорости передачи, низкая помехоустойчивость, последовательность в передаче информации, необходимость в источнике электрической энергии (батарея, турбогенератор), отбор гидравлической энергии для работы передатчика и турбогенератора, невозможность работы с продувкой воздухом и аэрированными жидкостями.
Электромагнитный канал связи (ЭМКС)
Системы с ЭМКС используют электромагнитные волны (токи растекания) между изолированным участком колонны бурильных труб и породой. На поверхности земли сигнал принимается как разность потенциалов от растекания тока по горной породе между бурильной колонной и приемной антенной, устанавливаемой в грунт на определенном расстоянии от буровой установки (РИС. 3).
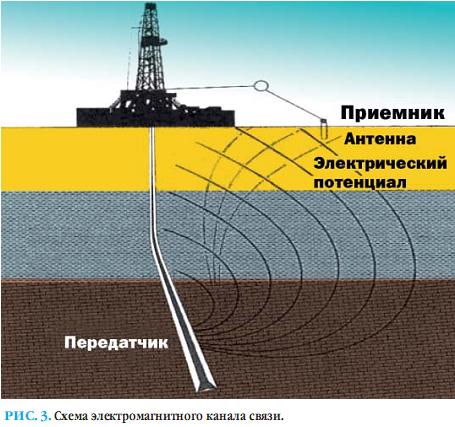
К преимуществам ЭМКС относится несколько более высокая информативность по сравнению с гидравлическим каналом связи. К недостаткам — дальность связи, зависящая от проводимости и перемежаемости горных пород, слабая помехоустойчивость, сложность установки антенны в труднодоступных местах.
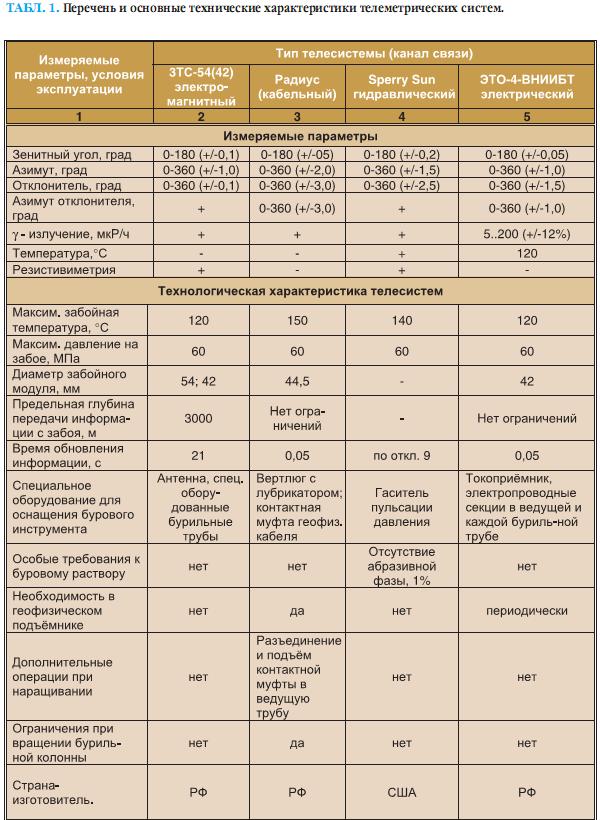
В ТАБЛ. 1 приводятся сравнительные характеристики телеметрических систем российских и зарубежных производителей с каналами связи различных типов.
Учитывая недостатки применяемых каналов связи, необходимо их совершенствовать, а также разрабатывать новые каналы, так как разнообразные горно-геологические условия, различные технико-технологические аспекты проводки скважин и экономические факторы предъявляют более высокие требования к информативности процесса бурения.
Представляет интерес возможность использования комбинированного канала связи. Суть этого вида связи заключается в использовании нескольких каналов связи одновременно — как вариант, это могут быть гидравлический, электромагнитный, механический и частично электропроводный, например, как ретранслятор. Для реализации этого вида связи в телеметрической системе устанавливаются гидравлический пульсатор и электромагнитный передатчик. Информация принимается на поверхности обычным способом для этих каналов связи. По механическому каналу связи принимается информация по вибрации долота. Электропроводной канал может быть использован для частичного погружения в колонну бурильных труб или за трубами для приема и ретрансляции ослабленных информационных сигналов от телеметрической системы при больших глубинах. Применение комбинированного канала связи позволит частично решить многолетние споры о перспективности дальнейшего использования того или иного канала связи забой — устье.
По пути усложнения
Одним из важных достижений в области совершенствования телеметрических систем являются модульные системы. Рассчитанные на максимальную эффективность и гибкость, эти системы более дешевы и экономичны по сравнению с любыми другими. Все оборудование такой системы имеет модульную конструкцию с полной совместимостью модулей, что дает возможность приобретать его в любом наборе, в виде отдельных секций или полным комплектом. Использование подобных систем помимо контроля навигационных и технологических параметров позволяет частично проводить комплекс геофизических исследований без остановки процесса бурения (технология logging while drilling (LWD) — геофизические исследования в процессе бурения). В частности, с помощью систем подобного типа можно осуществлять контроль за следующими параметрами:
Однако при современном уровне развития техники и технологий бурения информация о характеристиках пласта, получаемая в процессе бурения, является недостаточной. Необходимо иметь данные о кровле и подошве пласта, информацию о разрезе впереди долота, а также информацию о приближении к соседним скважинам, что особенно важно при разбу-ривании морских месторождений, где количество скважин, построенных относительно близко друг от друга, достигает нескольких десятков.
Усложнение процесса бурения стимулирует дальнейшее развитие разработок телеметрических систем. Основными направлениями совершенствования являются: увеличение количества измеряемых и передаваемых на поверхность параметров бурения, скорости передачи информации; создание в забойных устройствах автоматов, самостоятельно управляющих процессом проводки скважин (управляемый отклонитель, прибор корректирования нагрузки на долото и др. механизмы); использование двухсторонней связи забой — устье. Существенное повышение точности и качества проводки высокотехнологичных скважин невозможно без совершенствования наземного бурового комплекса, способного автономно или при минимальном вмешательстве оператора осуществлять бурение в продуктивном пласте с учетом особенностей его фактического строения. Создание интеллектуально-автоматизированной буровой установки, которая будет контролировать и корректировать работу бурильщика, а в некоторых случаях — осуществлять бурение скважины или выполнение определенных операций в автоматическом режиме, является одним из приоритетных направлений зарубежных и отечественных производителей бурового оборудования.
Принципиальная блок-схема комплекса автоматического управления бурением скважины представлена на РИС. 4.
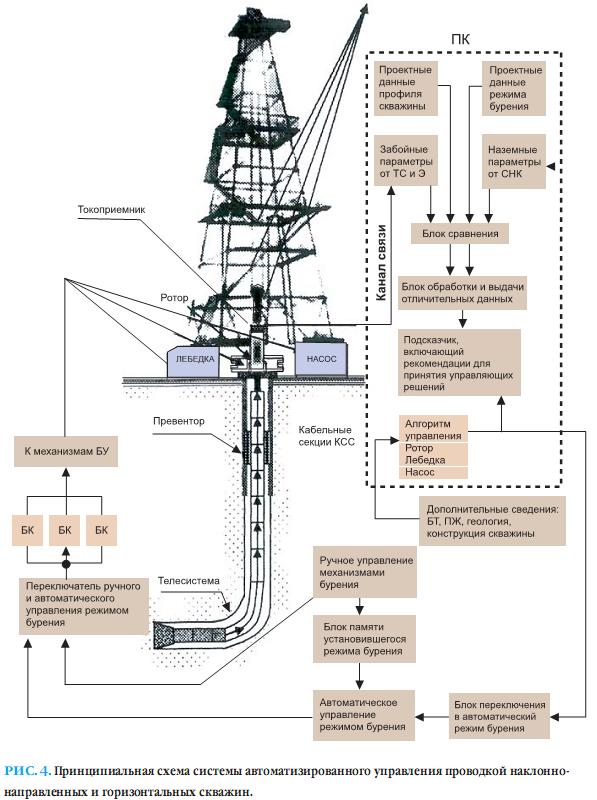
Система включает два комплекса параметров: забойные (телеметрическая система) и наземные (система контроля наземных параметров бурения). Возможности забойной части системы по сбору и первичному преобразованию данных подробно описаны выше. Система наземного контроля может быть представлена станцией геолого-технического контроля.
Основными задачами системы автоматизированного управления проводкой скважины являются:
Система автоматизированного управления проводкой наклонных и горизонтальных скважин позволит повысить качество строительства скважин, точность выполнения проектов, исключить субъективные ошибки персонала буровой установки даже при среднем уровне его квалификации, что даст существенную экономию при строительстве скважин.
Mwd и lwd что это

11.Системы передачи информации в процессе бурения.
Ø Кабельные системы.
«+» максимальная информативность, быстрота получения сигнала, помехоустойчивость, 2-х сторонняя связь, источник энергии на поверхности, работа с воздухом и аэрированными пром. жидк.
«-» наличие кабеля в (на) колонне, невозможность вращения колонны и закрытия ПВО.
Ø Электромагнитный канал.
«+» высокая информативность, низкая стоимость систем
«-» дальность зависит от глубины перемежаемости пород, низкая помехоустойчивость.
Ø Гидравлический канал :
— система на «+» импульсах (регистрируется ↑ давл. внутри бурильных труб).
— система непрерывных волн.
«+» применение без нарушения технологических процессов, независимость от глубины и пород.
«-» низкая скорость сигнала, низкая помехоустойчивость, необходимость в забойном источнике питания, невозможность работы с воздухом и аэрированными пром. жидк
12.Методы вычисления результатов измерений.
13.Устройство и принцип работы датчиков (магнитометры, акселерометры):
Магнитометры – состоят из двух параллельно расположенных катушек на которые подается напряжение определенной величины, в зависимости от расположения по отношению к магнитному полю земли скорость намагничивания катушек меняется, эти показания снимаются и переводятся в значения азимута скважины.
Акселерометр (Равновесный) – внутри корпуса с внешней обмоткой, в жидкости, находится магнит который удерживается в центральной позиции переменным током, при отклонении от горизонтального расположения корпуса акселерометра, магнит начинает перемещение и величина тока изменяется. Эти показания снимаются и переводятся в значении зенитного угла.
Акселерометр (Кварцевый стержневой) – магнит прикреплен на тонких подвесах к корпусу, переменный ток используется для удержания магнита в центральной позиции, при отклонении от горизонтального расположения корпуса акселерометра, магнит начинает перемещение и величина тока изменяется. Изменение отклика выходного напряжения переводятся в значении зенитного угла.
14.Установка датчика давления – датчик давления располагается в манифольдной линии или на стояке, на достаточном удалении от буровых насосов, мест резких перегибов направления линии высокого давления (для уменьшить вероятность возникновения помех) лучше в тёплом помещении.
Накачка компенсатора (гаситель пульсации) 30-40% от рабочего давления.
15.Промывочные жидкости: (параметры, единицы, физический смысл)
В – водоотдача (см3/30 мин.) Количество жидкой фазы отфильтровывающееся в стенки скважины из ПЖ.
ρ – удельный вес (г/см3). Вес единицы объема бурового раствора.
λ – липкость (град.) фрикционные свойства промывочной жидкости на сопротивление движению инструмента по поверхности фильтрационной корки.
П – содержание песка (%). Влияет на абразивные свойства бурового раствора.
СНС – статическое напряжение сдвига (мПа*с). Усилие для перевода ПЖ из состояния геля в жидкость.
ДНС – динамическое напряжение сдвига (сП). Усилие в промывочной жидкости при ее протекании.
Нефть и газ
назад к ОТРАСЛЕВЫМ РЕШЕНИЯМ

Компания Lasertekh работает с буровыми подрядчиками. Буровые подрядчики – это обслуживающие компании. Они реализуют либо определенную часть проекта, либо полный проект «под ключ» (например,компания Schlumberger). При этом некоторые компании продают операторам буровой установки бурильные инструменты или передают их в аренду. В случае передачи инструментов в аренду, обслуживающая компания будет обеспечивать парк бурильных инструментов, в том числе выполнять наварку твердыми сплавами. Lasertekh сотрудничает с обслуживающими компаниями (например, Baker Hughes) и с промышленными компаниями, изготавливающимибурильные инструменты. Конечно, в случае механического цеха, это будут только новые инструменты. Если это обслуживающая компания, Lasertekh обеспечит восстановление инструмента на заводе-изготовителе.
Существует 4 типа бурения
1. Турбинное бурение
Буровое долото на турбобуре вращается намного быстрее, чем на традиционном двигателе. В результате, меньший крутящий момент компенсируется более высокой скоростью. Это делает отверстие ровнееи помогает увеличить скорость проникновения бурового долота.
2. Вертикальное бурение
Это технология вертикального бурения. Как правило, забойный блок бурильной колонны оснащенвыдвижными башмаками для стабилизации отклонения бурового долота.
3. Горизонтальное бурение
Для данной технологии характерно проникновение в нефтяную залежь сбоку, посредством горизонтального бурения. Это улучшает коэффициент g родуктивности будущей скважины.
4. Наклонно-направленное бурение
В данной технологии используется роторная управляемая система, которая называется RSS. Данная система позволяет буровой штанге продвигаться в любом направлении. Это достигается путем попеременногосрабатывания нескольких выдвижных башмаков.
Описание буровой установки
При эксплуатации буровой установки можно использовать два отдельных приводных механизма:
Погружной электродвигатель,который также называется гидравлическим забойным двигателем;
Ротор буровой установки,который вращает всю колонну бурильных труб.
Погружные электродвигатели используются повсеместно, поскольку они позволяют достичь более высокого вращающего момента на буровом долоте.


Буровой насос закачивает химический буровой раствор в бурильный инструмент.
Поток бурового раствора побуждает к движению ротор, который передает вращающее движение на буровое долото. Типичная скорость бурового долота – 150.
Некоторая часть раствора возвращается из нисходящей скважины и проходит через сито, отделяющее буровой раствор от глинистой породы.
Система представляет собой замкнутый контур, и любая утечка снижает эффективность работы инструмента.
Буровой раствор используется также для смазывания некоторого оборудования низа бурильной колонны.
Описание двигателя буровой установки
На рисунке представлено схематическое изображение бурового двигателя с разными компонентами.
Двигатель можно использовать с закрепленным неподвижно или регулируемым кривым переводником или с роторной управляемой системой (RSS).
Назначение этих инструментов – изменять направлениебурового долота. Процесс с применением RSS позволяет осуществлять регулирование в режиме реального времени.
Компания Lasertekh может предложить решение для большинства компонентов оборудования низа бурильной колонны, в том числе буровое долото, стабилизатор, кривой переводник, радиальные подшипники, статоры, немагнитные инструменты для телеметрии/каротажа, утяжеленные бурильные трубы.

Стабилизатор бурильной колонны
Стабилизатор бурильной колонны является компонентом глубинного оборудования, который используется в компоновке низа бурильной колонны (BHA) бурового снаряда. Этот компонент предназначен для механической стабилизации BHA в стволе скважины во избежание непреднамеренного бурения вторых стволов, вибраций и для обеспечения качества пробуренного ствола

Типичный характер износа стабилизатора через несколько сотен часов работы

Буровое долото
В целом, буровое долото – это инструмент, предназначенный для выполнения цилиндрических отверстий.

Виды буровых долот
Долото ИСМ: — Долото со стальным корпусом. Полностью изготовлено из стального материала с механической обработкой и последующим наплавлением твердым сплавом. Алмазы, размещенные на спеченном карбиде вольфрама, припаиваются, и долото шлифуется для достижения точного размера.
— Долото с матричным корпусом (пропитанным металлом). Полностью выполнено из карбида вольфрама, пропитанного легкоплавким сплавом. Алмазы, закрепляемые на спеченном карбиде вольфрама, припаиваются, и долото шлифуется для достижения точного размера.
Трехшарошечное долото с фрезерными зубьями: Каждая шарошка обработана механически с последующим наплавлением твердым сплавом на основе твердосплавного покрытия, смешанного с карбидом вольфрама
Трехшарочное долото: — Выполнено из 3 шарошек. Шарошки полностью изготавливаются из стального материала с механической обработкой и армированы твердосплавными штырями из карбида вольфрама.
Решения Lasertekh
Для применения проволоки: TS GG ⌀ 6мм
Можно использовать порошок TP4000 или другую порошковую смесь. Перед наплавкой используются графитовые пробки для предупреждения попадания наплавки в отверстия для алмазов.



Скважинные расширители
Основная функция расширителей с цилиндрическими шарошками заключается в обрезке толщи пород для увеличения ствола скважины до необходимого размера в ходе бурения скважины. Скважинные расширители могут иметь оригинальный размер бурового долота в тех случаях, когда буровое долото изнашивается и его размер уменьшается.
Решения Lasertekh
Мы выполняем наплавку материала Technolase® 40S с волнообразным рисунком наплавки

Гидравлический забойный двигатель
Гидравлический забойный двигатель, который также называется аксиально-поршневым объемным двигателем (PDM), обеспечивает для бурового долота дополнительныйвращающий момент. В работе забойного двигателя используется принцип ротора и статора. Буровой растворпоступает между ротором и статором. Давление, создаваемое буровым раствором, заставляет ротор вращаться. Ротор, связанный с буровым долотом, заставляет вращаться буровое долото.


Наплавка с применением
LaserCarb® Technolase® 40S.
Подшипниковый узел: нижний и верхний радиальный подшипник и устройство отклонения потока;
Статор, кривой переводник;
Приводной вал (опорная шейка).
Примечание: как правило, ротор наплавляется с использованием высокоскоростного газопламенного напыления.

Подшипниковый узел: нижний, верхний радиальный подшипник и опорный подшипник. Они обеспечивают правильное вращение бурового долота. Они принимают радиальную нагрузку во время направленного или горизонтального бурения. Каждый узел состоит из вращающейся и стационарной частей. Вращающийся подшипник наплавлен твердым сплавом по внешней стороне, а стационарный – по внутренней стороне. Чтобы обеспечить идеальную посадку, всегда требуется чистовое шлифование. Подшипниковый узел смазывается буровым раствором. Опорный подшипник принимает осевую нагрузку двигателя.
Устройство отклонения потока: Буровой раствор, поступающий из ротора/статора, разделяется на раствор, который проходит через подшипниковый узел, и раствор, который идет к буровому долоту. Разделяет поток бурового раствора устройство отклонения потока. На внешний диаметр наносится футеровка, которая затем шлифуется.
Наддолотный стабилизатор: помогает удерживать буровое долото и бурильную трубу в центре отверстия. Статор: Наплавка твердосплавных покрытий может применяться на внешнюю часть инструмента Кривой переводник: Используется для изменения направления долота в ходе наклонно направленного бурения.

Подшипники: радиальный подшипник
Радиальный подшипник забойного двигателя
Компания Lasertekh изготавливает высококачественные подшипники с помощью технологии LaserCarb®.
Имея в своем распоряжении эту уникальную технологию, компания Lasertekh способна наносить высококачественное покрытие по внешнему и внутреннему диаметрам радиального подшипника.
Твердость и ударная вязкость Spherotene® (шарики из релита, которые производит компания Technogenia) в сочетании с уникальными свойствами лазерной техники дают на выходе совершенно однородное наплавленное покрытие.
Плавленый эвтектический карбид вольфрамаимеет жесткость, равную 3000 HV ±500, и при спекании дает покрытие высокой плотности. Лазерная техника позволяет контролировать зону теплового воздействия основного металла и обеспечивать высокое качество сцепления с основным металлом. Для усовершенствования радиальных подшипников двигателя и повышения эффективности бурения решением является прецизионность, воспроизводимость и способностьнаносить покрытие LaserCarb® толщиной от 0,020 дюймов до 0,125 дюймов.

Телеметрия (MWD)/каротаж во время бурения (LWD)
MWD: Измерения в процессе бурения Инструменты MWD обычно касаются измерений отклонения ствола скважины от вертикали, а также магнитного направления с севера. По существу, оператор MWD измеряет траекторию скважины по мере бурения. Эти инструменты выполнены из немагнитной нержавеющей стали.
LWD: Каротаж во время бурения Разница между MWD и LWD заключается в том, что в ходе MWD вы получаете данныев режиме реального времени, в то время как LWD работает как карта памяти. Вы можетепрочитать данные только после того, как инструмент будет извлечен из скважины. Изначально технология LWD была разработана в качестве дополнения к более раннейтехнологии MWD с целью полного или частичного замещения спуско-подъемного каротажа.
Каротажный кабель: Это все еще используемая технология. Каротажный кабель, как правило, относится к кабельной технологии, которая используется операторами дляспуска оборудования или измерительных приборов в скважину для операций в стволе скважины или оценки пласта.
Износ: Как правило, эти инструменты не демонстрируют интенсивного износа,поскольку находятся под датчиком. Обычно они защищены съемным калибратором или несколькими сменнымилентами, расположенными вдоль инструмента. В некоторых случаях сами УБТ наплавлены твердым сплавом. В настоящее время компания Baker Hughes использует наплавку твердым сплавом непосредственно на УБТ

Решения Lasertkh
Одинарный валик из материала 40S на два валика из материала TP 625.
Уменьшение поглощающего тепла;
Защита большей поверхности.



Роторные управляемые системы
Эта технология используется в наклонно-направленном бурении. Система, как правило, программируется инженером по MWD или инженером-технологом по наклонно-направленному бурению, который передает команды с использованием наземного оборудования (как правило, используя колебания давления в столбе бурового раствора или варианты вращения бурильной колонны), на которое реагирует инструмент, и постепенно регулирует башмаки в нужном направлении.
Вместо системы RSS, инструмент может также использовать кривой переводник или регулирующее кольцо. В этом случае может быть достигнуто лишь одно направление, в отличие от использования системы RSS, благодаря которой достигается любое направление.
Системы RSS. Кривой переводник:
Ремонтопригодный.
Наплавка материалом Инконель, затем материалом 40S.
Инструменты с лопастями.
40S на каждую лопасть. Рисунок наплавки зависит от инструмента.