Что такое шим контроллер, как он устроен и работает, виды и схемы
Раньше для питания устройств использовали схему с понижающим (или повышающим, или многообмоточным) трансформатором, диодным мостом, фильтром для сглаживания пульсаций. Для стабилизации использовались линейные схемы на параметрических или интегральных стабилизаторах. Главным недостатком был низкий КПД и большой вес и габариты мощных блоков питания.
Во всех современных бытовых электроприборах используются импульсные блоки питания (ИБП, ИИП – одно и то же). В большинстве таких блоков питания в качестве основного управляющего элемента используют ШИМ-контроллер. В этой статье мы рассмотрим его устройство и назначение.
Содержание статьи
Определение и основные преимущества
ШИМ-контроллер – это устройство, которое содержит в себе ряд схемотехнических решений для управления силовыми ключами. При этом управление происходит на основании информации полученной по цепям обратной связи по току или напряжению – это нужно для стабилизации выходных параметров.
Аббревиатура «ШИМ» расшифровывается, как широтно-импульсная модуляция – это один из методов модуляции сигнала не за счёт величины выходного напряжения, а именно за счёт изменения ширины импульсов. В результате формируется моделируемый сигнал за счёт интегрирования импульсов с помощью C- или LC-цепей, другими словами – за счёт сглаживания.
Вывод: ШИМ-контроллер – устройство, которое управляет ШИМ-сигналом.
Научитесь разрабатывать устройства на базе микроконтроллеров и станьте инженером умных устройств с нуля: Инженер умных устройств
Основные характеристики
Для ШИМ-сигнала можно выделить две основных характеристики:
1. Частота импульсов – от этого зависит рабочая частота преобразователя. Типовыми являются частоты выше 20 кГц, фактически 40-100 кГц.
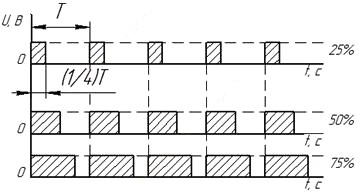
2. Коэффициент заполнения и скважность. Это две смежных величины характеризующие одно и то же. Коэффициент заполнения может обозначаться буквой S, а скважность D.
где T – это период сигнала,
Коэффициент заполнения – часть времени от периода, когда на выходе контроллера формируется управляющий сигнал, всегда меньше 1. Скважность всегда больше 1. При частоте 100 кГц период сигнала равен 10 мкс, а ключ открыт в течении 2.5 мкс, то коэффициент заполнения – 0.25, в процентах – 25%, а скважность равна 4.
Также важно учитывать внутреннюю конструкцию и предназначение по количеству управляемых ключей.
Отличия от линейных схем потери
Как уже было сказано, преимуществом перед линейными схемами у импульсных источников питания является высокий КПД (больше 80, а в настоящее время и 90%). Это обусловлено следующим:
Допустим сглаженное напряжение после диодного моста равно 15В, ток нагрузки 1А. Вам нужно получить стабилизированное питание напряжением 12В. Фактически линейный стабилизатор представляет собой сопротивление, которое изменяет свою величину в зависимости от величины входного напряжения для получения номинального выходного – с небольшими отклонениями (доли вольт) при изменениях входного (единицы и десятки вольт).
На резисторах, как известно, при протекании через них электрического тока выделяется тепловая энергия. На линейных стабилизаторах происходит такой же процесс. Выделенная мощность будет равна:
Так как в рассмотренном примере ток нагрузки 1А, входное напряжение 15В, а выходное – 12В, то рассчитаем потери и КПД линейного стабилизатора (КРЕНка или типа L7812):
Pпотерь=(15В-12В)*1А = 3В*1А = 3Вт
Если же входное напряжение вырастит до 20В, например, то КПД снизится:
Основной особенностью ШИМ является то, что силовой элемент, пусть это будет MOSFET, либо открыт полностью, либо полностью закрыт и ток через него не протекает. Поэтому потери КПД обусловлены только потерями проводимости
И потерями переключения. Это тема для отдельной статьи, поэтому не будем останавливаться на этом вопросе. Также потери блока питания возникают в выпрямительных диодах (входных и выходных, если блок питания сетевой), а также на проводниках, пассивных элементах фильтра и прочем.
Общая структура
Рассмотрим общую структуру абстрактного ШИМ-контроллер. Я употребил слово «абстрактного» потому что, в общем, все они похожи, но их функционал все же может отличаться в определенных пределах, соответственно будет отличаться структура и выводы.
Внутри ШИМ-контроллера, как и в любой другой ИМС находится полупроводниковый кристалл, на котором расположена сложная схема. В состав контроллера входят следующие функциональные узлы:
1. Генератор импульсов.
2. Источник опорного напряжения. (ИОН)
3. Цепи для обработки сигнала обратной связи (ОС): усилитель ошибки, компаратор.
4. Генератор импульсов управляет встроенными транзисторами, которые предназначены для управления силовым ключом или ключами.
От типа ключа также зависит выбор ШИМ-контроллера. Для управления биполярным транзистором основным требованием является, чтобы выходной ток управления ШИМ-контроллера не был ниже, чем ток транзистора деленный на H21э, чтобы его включать и отключать достаточно просто подавать импульсы на базу. В этом случае подойдет большинство контроллеров.
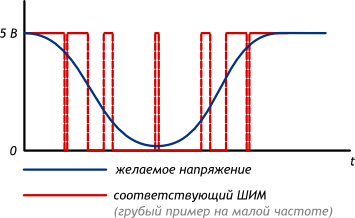
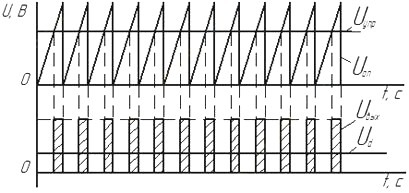
Если говорить обобщенно, то ШИМ-контроллер можно представить в виде компаратора, на один вход которого подан сигнал с цепи обратной связи (ОС), а на второй вход пилообразный изменяющийся сигнал. Когда пилообразный сигнал достигает и превышает по величине сигнал ОС, то на выходе компаратора возникает импульс.
При изменениях сигналов на входах ширина импульсов меняется. Допустим, что вы подключили мощный потребитель к блоку питания, и на его выходе напряжение просело, тогда напряжение ОС также упадет. Тогда в большей части периода будет наблюдаться превышение пилообразного сигнала над сигналом ОС, и ширина импульсов увеличится. Всё вышесказанное в определенной мере отражено на графиках.
Рабочая частота генератора устанавливается с помощью частотозадающей RC-цепи.
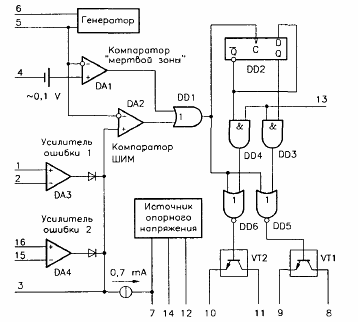
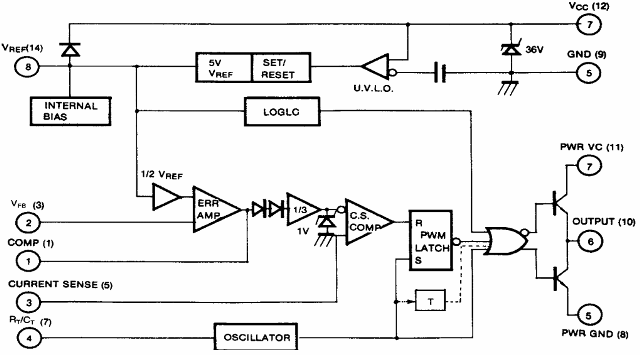
Функциональная схема ШИМ-контроллера на примере TL494, мы рассмотрим его позже подробнее. Назначение выводов и отдельных узлов описано в следующем подзаголовке.
Назначение выводов
Поэтому рассмотрим типовые названия выводов и их назначение:
GND – общий вывод соединяется с минусом схемы или с землей.
Uc (Vc) – питание микросхемы.
Ucc (Vss, Vcc) – Вывод для контроля питания. Если питание проседает, то возникает вероятность того, что силовые ключи не будут полностью открываться, а из-за этого начнут греться и сгорят. Вывод нужен чтобы отключить контроллер в подобной ситуации.
Vref – опорное напряжения, обычно соединяется с землей через небольшой конденсатор (единицы микрофарад).
ILIM – сигнал с датчика тока. Нужен для ограничения выходного тока. Соединяется с цепями обратной связи.
ILIMREF – на ней устанавливается напряжение срабатывания ножки ILIM
SS – формируется сигнал для мягкого старта контроллера. Предназначен для плавного выхода на номинальный режим. Между ней и общим проводом для обеспечения плавного пуска устанавливают конденсатор.
RtCt – выводы для подключения времязадающей RC-цепи, которая определяет частоту ШИМ-сигнала.
CLOCK – тактовые импульсы для синхронизации нескольких ШИМ-контроллеров между собой тогда RC-цепь подключается только к ведущему контроллеру, а RT ведомых с Vref, CT ведомых соединяюся с общим.
EAOUT или Error Amplifier Output рус. Выход усилителя ошибки. Не смотря на то, что есть входы усилителя ошибки и с их помощью, в принципе можно регулировать выходные параметры, но контроллер довольно медленно на это реагирует. В результате медленной реакции может возникнуть возбуждение схемы, и она выйдет из строя. Поэтому с этого вывода через частотозависимые цепи подают сигналы на INV. Это еще называется частотной коррекцией усилителя ошибки.
Примеры реальных устройств
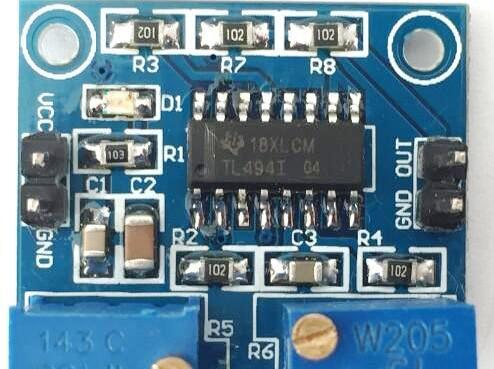
Для закрепления информации давайте рассмотрим несколько примеров типовых ШИМ-контроллеров и их схем включения. Мы будем делать это на примере двух микросхем:
TL494 (её аналоги: KA7500B, КР1114ЕУ4, Sharp IR3M02, UA494, Fujitsu MB3759);
Они активно используются в блоках питания для компьютеров. Кстати, эти блоки питания обладают немалой мощностью (100 Вт и больше по 12В шине). Часто используются в качестве донора для переделки под лабораторный блок питания или универсальное мощное зарядное устройство, например для автомобильных аккумуляторов.
TL494 – обзор
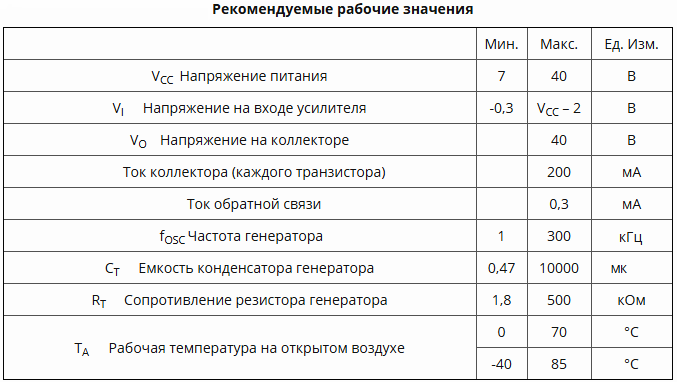
Начнем с 494-й микросхемы. Её технические характеристики:
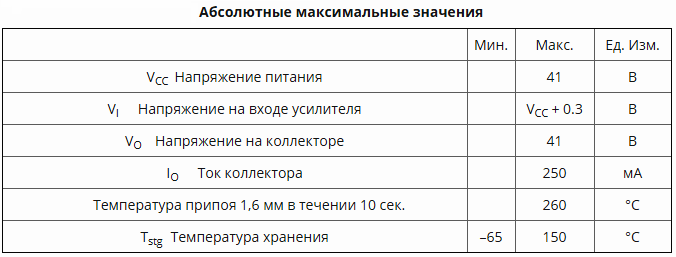
В этом конкретном примере можно видеть большинство описанных выше выводов:
1. Неинвертирующий вход первого компаратора ошибки
2. Инвертирующий вход первого компаратора ошибки
3. Вход обратной связи
4. Вход регулировки мертвого времени
5. Вывод для подключения внешнего времязадающего конденсатора
6. Вывод для подключения времязадающего резистора
7. Общий вывод микросхемы, минус питания
8. Вывод коллектора первого выходного транзистора
9. Вывод эмиттера первого выходного транзистора
10. Вывод эмиттера второго выходного транзистора
11. Вывод коллектора второго выходного транзистора
12. Вход подачи питающего напряжения
13. Вход выбора однотактного или же двухтактного режима работы микросхемы
14. Вывод встроенного источника опорного напряжения 5 вольт
15. Инвертирующий вход второго компаратора ошибки
16. Неинвертирующий вход второго компаратора ошибки
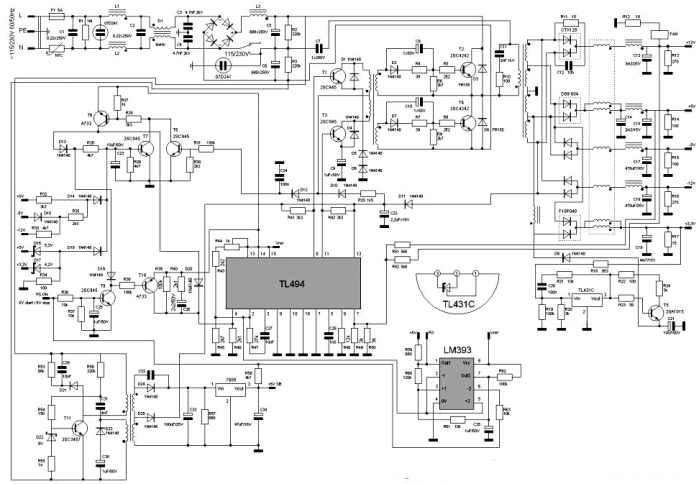
На рисунке ниже изображен пример компьютерного блока питания на этой микросхеме.
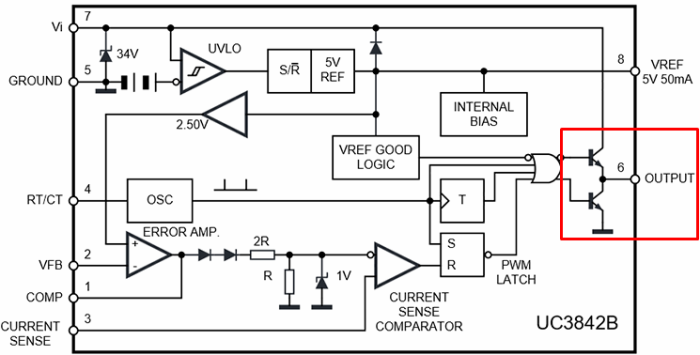
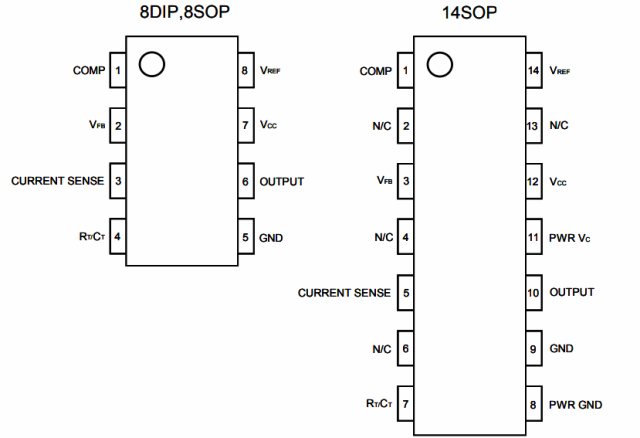
Другой популярной ШИМ является микросхема 3843 – на ней также строятся компьютерные и не только блоки питания. Её цоколевка расположена ниже, как вы можете наблюдать, у неё всего 8 выводов, но функции она выполняет те же, что и предыдущая ИМС.
Бывает UC3843 и в 14-ногом корпусе, но встречаются гораздо реже. Обратите внимание на маркировку – дополнительные выводы либо дублируются, либо незадействованы (NC).
Расшифруем назначением выводов:
1. Вход компаратора (усилителя ошибки).
2. Вход напряжения обратной связи. Это напряжение сравнивается с опорным внутри ИМС.
3. Датчик тока. Подключается к резистору стоящему в между силовым транзистором и общим проводом. Нужен для защиты от перегрузок.
4. Времязадающая RC-цепь. С её помощью задаётся рабочая частота ИМС.
6. Выход. Управляющее напряжение. Подключается к затвору транзистора, здесь двухтактный выходной каскад для управления однотактным преобразователем (одним транзистором), что можно наблюдать на рисунке ниже.
7. Напряжение питания микросхемы.
8. Выход источника опорного напряжения (5В, 50 мА).
Её внутренняя структура.
Можно убедится, что во многом похожа и на другие ШИМ-контроллеры.
Простая схема сетевого источника питания на UC3842
Явно полезное:
ШИМ со встроенным силовым ключем
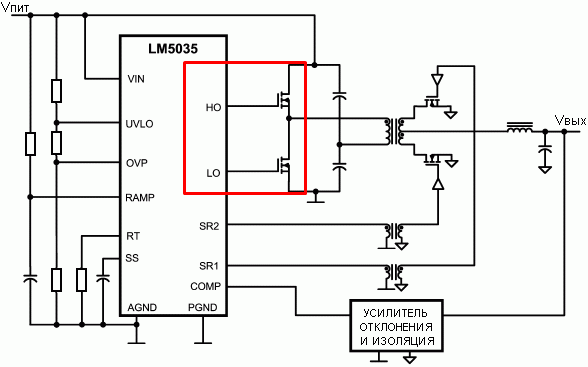
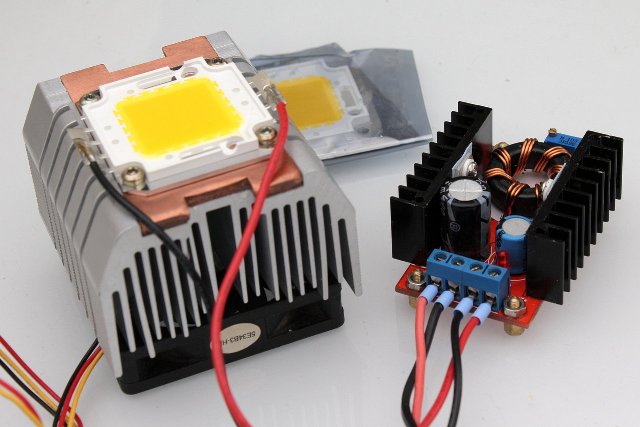
ШИМ-контроллеры со встроенным силовым ключем используются как в трансформаторных импульсных блоках питания, так и в бестрансформаторных DC-DC преобразователях понижающего (Buck), повышающего (Boost) и понижающее-повышающего (Buck-Boost) типов.
Пожалуй, одним из наиболее удачных примеров будет распространенная микросхема LM2596, на базе которого на рынке можно найти массу таких преобразователей, как изображен ниже.
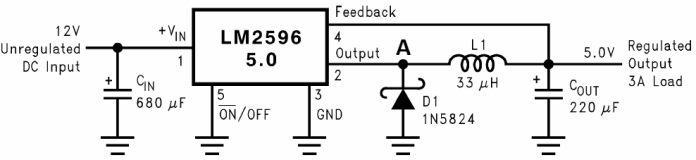
Такая микросхема содержит в себе все вышеописанные технические решения, а также вместо выходного каскада на маломощных ключах в ней встроен силовой ключ, способный выдержать ток до 3А. Ниже изображена внутренняя структура такого преобразователя.
Можно убедиться, что в сущности особых отличий от рассмотренных в ней нет.
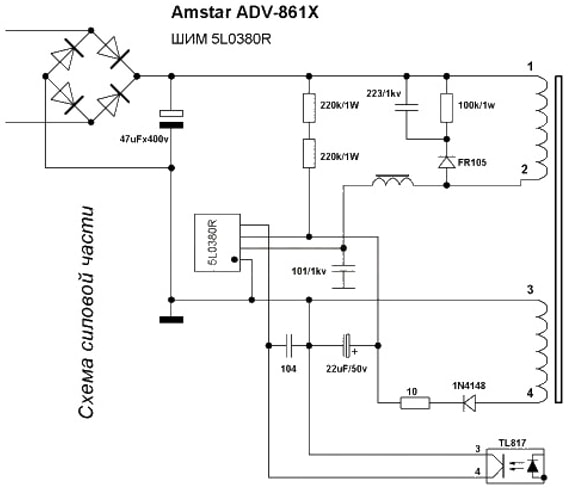
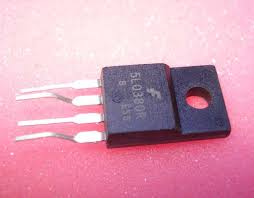
А вот пример трансформаторного блока питания для светодиодной ленты на подобном контроллере, как видите силового ключа нет, а только микросхема 5L0380R с четырьмя выводами. Отсюда следует, что в определенных задачах сложная схемотехника и гибкость TL494 просто не нужна. Это справедливо для маломощных блоков питания, где нет особых требований к шумам и помехам, а выходные пульсации можно погасить LC-фильтром. Это блок питания для светодиодных лент, ноутбуков, DVD-плееров и прочее.
Заключение
В начале статьи было сказано о том, что ШИМ-контроллер это устройство которое моделирует среднее значение напряжения за счет изменения ширина импульсов на основании сигнала с цепи обратной связи. Отмечу, что названия и классификация у каждого автора часто отличается, иногда ШИМ-контроллером называют простой ШИМ-регулятор напряжения, а описанное в этой статьей семейство электронных микросхем называют «Интегральная подсистема для импульсных стабилизированных преобразователей». От названия суть не меняется, но возникают споры и недопонимания.
ШИМ pwm контроллер: принцип работы, область применения, характеристики
Что такое ШИМ (широтно-импульсная модуляция)
При широтно-импульсной модуляции исходного сигнала неизменными остаются амплитуда, частота и фаза исходного сигнала. Изменению под действием информационного сигнала подвергается длительность (ширина) прямоугольного импульса. В англоязычной технической литературе обозначается аббревиатурой PWM – pulse-width modulation.
Частота ШИМ определяет период импульса — T (см картинку выше). Требования к этой частоте диктуются несколькими факторами, в зависимости от типа управляемого устройства.
В случае управления светодиодами одним из главных факторов становится видимость мерцания. Чем выше частота, тем менее заметно мерцание излучаемого света. Высокая частота также помогает снизить влияние температурных скачков, которые светодиоды не любят. На практике для светодиодов достаточно иметь частоту ШИМ в пределах 100-300 Гц.
С моторами постоянного тока дела обстоят немного иначе. С одной стороны, чем больше частота, тем более плавно и менее шумно работает мотор. С другой — на высоких частотах падает крутящий момент. Нужен баланс. Более подробно о моторах мы поговорим в одной из будущих статей, а пока рекомендуем для большинства DIY задач использовать частоту ШИМ 2кГц.
Плюс, общая проблема для всех случаев управления силовой нагрузкой — потери в цепях силовой коммутации (в транзисторах, и не только), которые увеличиваются с ростом частоты ШИМ. Чем больше частота, тем большее время транзисторы находятся в переходных состояниях, активно выделяя тепло и снижая эффективность системы.
Ещё один важный параметр — разрешение ШИМ сигнала. Этот параметр показывает, с какой точностью мы можем менять коэффициент заполнения. Чем больше разрешение, тем плавнее будет меняться мощность на управляемом устройстве.
Например, у платы Ардуино с базовыми настройками, разрешение ШИМ — 256. То есть мы можем изменять сигнал от 0 до 255 — не густо, но для большинства DIY задач хватает.
Характеристики ШИМ
Для Широтно-модулированного сигнала характеристик всего две:
F – Частота сигнала
Таким образом, коэффициент заполнения ничто иное как интервал от периода сигнала. Отсюда следует что он (коэффициент заполнения) всегда будет меньше единицы, что не скажешь о скважности – она всегда будет больше 1.
Частота сигнала = 50 кГц.
Период сигнала = 20 мкс.
Теперь предположим, что ключ выхода ШИМ открывается на 4 мкс. Коэффициент заполнение составит минус 20%, а скважность будет равна 5.
![]()
Конечно же, в расчет необходимо брать конструкцию ШИМ, исходя из количества силовых ключей.
Формирование ШИМ-сигналов
Создавать ШИМ-сигналы нужной формы достаточно трудно. Тем не менее индустрия сегодня может порадовать замечательными специальными микросхемами, известными как ШИМ-контроллеры. Они недорогие и целиком решают задачу формирования широтно-импульсного сигнала. Сориентироваться в устройстве подобных контроллеров и их использовании поможет ознакомление с их типичной конструкцией.
Стандартная схема контроллера ШИМ предполагает наличие следующих выходов:
Выходное управляющее напряжение (OUT)
Количество выводов микросхемы определяется её конструкцией и принципом работы. Не всегда удается сразу разобраться в сложных терминах, но попробуем выделить суть. Существуют микросхемы на 2-х выводах, управляющие двухтактными (двухплечевыми) каскадами (примеры: мост, полумост, 2-тактный обратный преобразователь). Существуют и аналоги ШИМ-контроллеров для управления однотактными (одноплечевыми) каскадами (примеры: прямой/обратный, повышающий/понижающий, инвертирующий).
Помимо этого, выходной каскад может быть по строению одно- и двухтактным. Двухтактный используется в основном для управления полевым транзистором, зависящим от напряжения. Для быстрого закрытия необходимо добиться быстрой разрядки емкостей “затвор – исток” и “затвор – сток”. Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор.
Для контроля над биполярным транзистором двухтактный каскад не используется, так как управление осуществляется с помощью тока, а не напряжения. Для закрытия биполярного транзистора достаточно всего лишь прекратить протекание тока через базу. При этом замыкание базы на общий провод необязательно.
Область применения
С развитием микроконтроллерной техники перед ШИМ открылись новые возможности. Этот принцип стал основой для электронных устройств, требующих, как регулировки выходных параметров, так и поддержания их на заданном уровне. Метод широтно-импульсной модуляции применяется для изменения яркости света, скорости вращения двигателей, а также в управлении силовым транзистором блоков питания (БП) импульсного типа.
Широтно-импульсная (ШИ) модуляция активно используется в построении систем управления яркостью светодиодов. Благодаря низкой инерционности, светодиод успевает переключаться (вспыхивать и гаснуть) на частоте в несколько десятков кГц. Его работа в импульсном режиме воспринимается человеческим глазом как постоянное свечение. В свою очередь яркость зависит от длительности импульса (открытого состояния светодиода) в течение одного периода. Если время импульса равно времени паузы, то есть коэффициент заполнения – 50%, то яркость светодиода будет составлять половину от номинальной величины. С популяризацией светодиодных ламп на 220В стал вопрос о повышении надёжности их работы при нестабильном входном напряжении. Решение было найдено в виде универсальной микросхемы – драйвера питания, работающего по принципу широтно-импульсной или частотно-импульсной модуляции. Схема на базе одного из таких драйверов детально описана здесь.
Подаваемое на вход микросхемы драйвера сетевое напряжение постоянно сравнивается с внутрисхемным опорным напряжением, формируя на выходе сигнал ШИМ (ЧИМ), параметры которого задаются внешними резисторами. Некоторые микросхемы имеют вывод для подачи аналогового или цифрового сигнала управления. Таким образом, работой импульсного драйвера можно управлять с помощью другого ШИ-преобразователя. Интересно, что на светодиод поступают не высокочастотные импульсы, а сглаженный дросселем ток, который является обязательным элементом подобных схем.
Масштабное применение ШИМ отражено во всех LCD панелях со светодиодной подсветкой. К сожалению, в LED мониторах большая часть ШИ-преобразователей работает на частоте в сотни Герц, что негативно отражается на зрении пользователей ПК.
Микроконтроллер Ардуино тоже может функционировать в режиме ШИМ контроллера. Для этого следует вызвать функцию AnalogWrite() с указанием в скобках значения от 0 до 255. Ноль соответствует 0В, а 255 – 5В. Промежуточные значения рассчитываются пропорционально.
Повсеместное распространение устройств, работающих по принципу ШИМ, позволило человечеству уйти от трансформаторных блоков питания линейного типа. Как результат – повышение КПД и снижение в несколько раз массы и размеров источников питания.
ШИМ-контроллер является неотъемлемой частью современного импульсного блока питания. Он управляет работой силового транзистора, расположенного в первичной цепи импульсного трансформатора. За счёт наличия цепи обратной связи напряжение на выходе БП всегда остаётся стабильным. Малейшее отклонение выходного напряжения через обратную связь фиксируется микросхемой, которая мгновенно корректирует скважность управляющих импульсов. Кроме этого современный ШИМ-контроллер решает ряд дополнительных задач, способствующих повышению надёжности источника питания:
Ещё о функциях контроллеров ШИМ
Задумав спроектировать контроллер ШИМ своими руками, необходимо как следует продумать все детали его реализации. Только так можно создать работающее устройство. Кроме вышеуказанных выходов, работа ШИМ-контроллера подразумевает наличие следующих функций:
ШИМ контроллер: принцип работы
ШИМ сигналом управляет ШИМ контроллер. Он управляет силовым ключом благодаря изменениям управляющих импульсов. В ключевом режиме транзистор может быть полностью открытым или полностью открытым. В закрытом состоянии через p-n-переход идет ток не больше нескольких мкА, то есть мощность рассеивания близка к нулю. В открытом состоянии идет большой ток, но так как сопротивление p-n-перехода мало, происходят небольшие теплопотери. Больше тепла выделяется в при переходе из одного состояния в другое. Однако благодаря быстроте переходного процесса в сравнении с частотой модуляции, мощность этих потерь незначительна.
Все это позволило разработать высокоэффективный компактный широтно импульсный преобразователь, то есть с малыми теплопотерями. Резонансные преобразователи с переключением в 0 тока ZCS позволяют свести теплопотери к минимуму.
Аналоговая ШИМ
В аналоговых ШИМ-генераторах управляющий сигнал формируется при помощи аналогового компаратора, когда на его инвертирующий вход подается пилообразный или треугольный сигнал, а на неинвертирующий — непрерывный модулирующий.
Выходные импульсы идут прямоугольной формы. Частота их следования соответствует частоте пилы, а длительность плюсовой части импульса зависит от времени, когда уровень постоянного модулирующего сигнала, идущего на неинвертирующий вход компаратора, выше уровня пилообразного сигнала, подающегося на инвертирующий вход. В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.
Во время когда пилообразный сигнал подается на неинвертирующий вход, а модулирующий — на инвертирующий, выходные прямоугольные импульсы будут положительными, когда напряжение пилы будет выше уровня модулирующего сигнала на инвертирующем входе, а отрицательное — когда напряжение пилы станет ниже сигнала модулирующего.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
Вопрос решается применением метода широтно-импульсной модуляции и, используя явление передискретизации, когда заданная частота переключения в несколько раз превышает реакцию управляемого устройства. Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
![]()
![]()
Микросхема ШИМ с силовым ключом в одном корпусе
Подобные ШИМ-контроллеры используются как в импульсных блоках питания на базе импульсного трансформатора, так и в DC-DC понижающих или повышающих преобразователях.
Можно привести в пример одну из самых распространенных микросхем в этом сегменте – LM2596. На её базе можно найти большое количество схем преобразователей, в том числе и изображенная ниже.
![]()
LM2596 включает в себя все технические решения, описанные выше, плюс в неё еще интегрирован силовой ключ на ток до 3 Ампер.
Структура микросхемы LM2596
![]()
Как можно увидеть больших отличий от микросхем, которые мы рассматривали ранее в ней нет.
Еще один пример блока питания для светодиодных лент на ШИМ-контроллере 5L0380R – У неё всего 4 вывода. Как можно заметить в схеме отсутствует силовой ключ. Естественно он в микросхеме, а сама микросхема выполнена в корпусе транзистора и крепится на радиатор.
Изучая ШИМ-контроллеры можно сделать несколько выводов: Если мы имеем дело с мощным источником питания и нам необходима достаточная гибкость использования этого контроллера, то такая микросхема как TL494 (и подобные) подходит для таких задач лучше. А если блок питания средней и невысокой мощности, то вполне свою роль выполнят ШИМ-контроллеры с интегрированными в них силовыми ключами. В таких бп нет больших требований к пульсациям и помехам, а выходные цепи можно сгладить фильтрами. Обычно это блоки питания для бытовой техники, светодиодных лент, ноутбуков, зарядных адаптеров.
![]()
Как проверить ШИМ-контроллер
Есть несколько способов как сделать проверку ШИМ-контроллера. Можно, конечно это сделать без мультиметра, но зачем так мучаться, если можно воспользоваться нормальным прибором.
Прежде, чем проверять работу ШИМ-контроллера, необходимо выполнить базовую диагностику самого блока питания. Она выполняется так:
Шаг 1. Внимательно осмотреть в выключенном состоянии сам источник питания, в котором установлен PWM. В частности надо тщательно осмотреть электролитические конденсаторы на предмет вздутости.
Шаг 2. Провести проверку предохранителя и элементов входного фильтра блока питания на исправность.
Шаг 3. Провести проверку на короткое замыкание или обрыв диодов выпрямительного моста. Прозвонить их можно не выпаивая из платы. При этом надо быть уверенным, что проверяемая цепь не шунтируется обмотками трансформатора или резистором. Если есть на это подозрение, то всё таки придётся выпаивать элементы и проверять уже по отдельности.
Шаг 4. Провести проверку исправностм выходных цепей, а именно электролитических конденсаторов низкочастотных фильтров, выпрямительных диодов, диодных сборок и т.п.
Шаг 5. Провести проверку силовых транзисторов высокочастотного преобразователя и транзисторов каскада управления. При этом в обязательном порядке проверьте возвратные диоды, которые включенны параллельно электродам коллектор-эмиттер силовых транзисторов.
Проверка ШИМ-контроллера — видео инструкции:
Расположение и назначение выводов микросхемы.
Это не инвертирующий (положительный) вход усилителя ошибки 1.
Если входное напряжение на нём будет ниже, чем напряжение на выводе 2, то на выходе этого усилителя ошибки 1, напряжения не будет (выход будет иметь низкий уровень) и он не будет оказывать никакого влияния на ширину (скважность) выходных импульсов.
Если на этом выводе напряжение будет выше, чем на выводе 2, то на выходе этого усилителя 1, появится напряжение (выход усилителя 1, будет иметь высокий уровень) и ширина (скважность) выходных импульсов будет уменьшаться тем больше, чем выше выходное напряжение этого усилителя (максимум 3,3 вольта).
Это инвертирующий (отрицательный) вход усилителя сигнала ошибки 1.
Если входное напряжение на этом выводе выше, чем на выводе 1, на выходе усилителя ошибки напряжения не будет (выход будет иметь низкий уровень) и он не будет оказывать никакого влияния на ширину (скважность) выходных импульсов.
Если же напряжение на этом выводе ниже, чем на выводе 1, выход усилителя будет иметь высокий уровень.
Это выходы усилителей ошибки 1 и 2, соединённых с этим выводом через диоды (схема ИЛИ). Если напряжение на выходе какого-либо усилителя меняется с низкого на высокий уровень, то на выводе 3 оно также переходит в высокий.
Если напряжение на этом выводе превысит 3,3 В, то импульсы на выходе микросхемы пропадают (нулевая скважность).
Если напряжение на этом выводе близко к 0 В, тогда длительность выходных импульсов (скважность) будет максимальна.
Вывод 3 обычно используется для обеспечения ОС усилителей, но если это необходимо, то вывод 3 может быть использован и в качестве входного, для обеспечения изменения ширины импульсов.
Если напряжение на нем высокое (>
3,5 В), то импульсы на выходе МС будут отсутствовать. Блок питания не запустится ни при каких обстоятельствах.
Он управляет диапазоном изменения “мёртвого” времени (англ. Dead-Time Control), в принципе это та же самая скважность.
Если напряжение на нем будет близко к 0 В, то на выходе микросхемы будут, как минимально возможные, так и максимальные по ширине импульсы, что соответственно может задаваться другими входными сигналами (усилители ошибок, вывод 3).
Если напряжение на этом выводе будет около 1,5 В, то ширина выходных импульсов будет в районе 50% от их максимальной ширины.
Если напряжение на этом выводе превысит 3,3 В, то импульсы на выходе МС будут отсутствовать. Блок питания не запустится ни при каких обстоятельствах.
Но стоит не забывать, что при увеличении “мёртвого” времени, диапазон регулировки ШИМ будет уменьшаться.
Изменяя напряжение на выводе 4, можно задавать фиксированную ширину “мёртвого” времени (R-R делителем), осуществить в БП режим мягкого старта (R-C цепочкой), обеспечить дистанционное выключение МС (ключ), а также можно использовать этот вывод, как линейный управляющий вход.
Давайте рассмотрим (для тех, кто не знает), что такое “мёртвое” время и для чего оно нужно.
При работе двухтактной схемы БП, импульсы поочерёдно подаются с выходов микросхемы на базы (затворы) выходных транзисторов. Так как любой транзистор – элемент инерционный, он не может мгновенно закрыться (открыться) при снятии (подаче) сигнала с базы (затвора) выходного транзистора. И если на выходные транзисторы подавать импульсы без “мёртвого” времени (то есть с одного импульс снять и на второй сразу подать), может наступить такой момент, когда один транзистор не успеет закрыться, а второй уже открылся. Тогда весь ток (называется сквозной ток) потечёт через оба открытых транзистора минуя нагрузку (обмотку трансформатора), и так как он ни чем не будет ограничен, выходные транзисторы мгновенно выйдут из строя.
Чтобы такое не произошло, необходимо после окончания одного импульса и до начала следующего – прошло какое-то определённое время, достаточное для надёжного закрытия того выходного транзистора, со входа которого снят управляющий сигнал.
Это время и называется “мёртвым” временем.
Да, ещё если посмотреть рисунок с составом микросхемы, то мы видим, что вывод 4 соединён со входом компаратора регулировки мертвым временем (DA1) через источник напряжения, величиной 0,1-0,12 В. Для чего это сделано?
Это как раз и сделано для того, чтобы максимальная ширина (скважность) выходных импульсов никогда не была равна 100%, для обеспечения безопасной работы выходных (выходного) транзисторов.
То есть если “посадить” вывод 4 на общий провод, то на входе компаратора DA1 всё равно не будет нулевого напряжения, а будет напряжение как раз этой величины (0,1-0,12 В) и импульсы с генератора пилообразного напряжения (ГПН) появятся на выходе микросхемы только тогда, когда их амплитуда на выводе 5, превысит это напряжение. То есть микросхема имеет фиксированный максимальный порог скважности выходных импульсов, который не превысит для однотактного режима работы выходного каскада 95-96%, и для двухтактного режима работы выходного каскада – 47,5-48%.
Это вывод ГПН, он предназначен для подключения к нему времязадающего конденсатора Ct, второй конец которого подсоединяется к общему проводу. Ёмкость его выбирается обычно от 0,01 мкФ до 0,1 мкФ, в зависимости от выходной частоты ГПН импульсов ШИМ-контроллера. Как правило здесь используются конденсаторы высокого качества.
Выходную частоту ГПН можно как раз контролировать на этом выводе. Размах выходного напряжения генератора (амплитуда выходных импульсов) где-то в районе 3-х вольт.
Тоже вывод ГПН, предназначенный для подключения к нему врямя-задающего резистора Rt, второй конец которого подсоединяется к общему проводу.
Величины Rt и Ct определяют выходную частоту ГПН, и рассчитываются по формуле для однотактного режима работы;
Для двухтактного режима работы формула имеет следующий вид;
Для ШИМ-контроллеров других фирм, частота рассчитывается по такой же формуле, за исключением – цифру 1 необходимо будет поменять на 1,1.
Он присоединяется к общему проводу схемы устройства на ШИМ-контроллере.
В составе микросхемы имеется выходной каскад с двумя выходными транзисторами, которые являются ее выходными ключами. Выводы коллекторов и эмиттеров этих транзисторов свободные, и поэтому в зависимости от необходимости, эти транзисторы можно включать в схему для работы как с общим эмиттером, так и с общим коллектором.
В зависимости от напряжения на выводе 13, этот выходной каскад может работать как в двухтактном режиме работы, так и в однотактном. В однотактном режиме работы эти транзисторы можно соединять параллельно для увеличения тока нагрузки, что обычно и делают.
Так вот, вывод 8, это вывод коллектора транзистора 1.
Это вывод эмиттера транзистора 1.
Это вывод эмиттера транзистора 2.
Это коллектор транзистора 2.
К этому выводу подсоединяется «плюс» источника питания TL494CN.
Это вывод выбора режима работы выходного каскада. Если этот вывод подсоединить к общему проводу, выходной каскад будет работать в однотактном режиме. Выходные сигналы на выводах транзисторных ключей будут одинаковыми.
Если подать на этот вывод напряжение +5 В (соединить между собой выводы 13 и 14), то выходные ключи будут работать в двухтактном режиме. Выходные сигналы на выводах транзисторных ключей будут противофазны и частота выходных импульсов будет в два раза меньше.
Это выход стабильного Источника Опорного Напряжения (ИОН), С выходным напряжением +5 В и выходным током до 10 мА, которое может быть использовано в качестве образцового для сравнения в усилителях ошибки, и в других целях.
Он работает точно так же, как и вывод 2. Если второй усилитель ошибки не используется, то вывод 15 просто подключают к 14-му выводу (опорное напряжение +5 В).
Он работает так же, как и вывод 1. Если второй усилитель ошибки не используется, то его обычно подключают к общему проводу (вывод 7).
С выводом 15, подключенным к +5 В и выводом 16, подключенным к общему проводу, выходное напряжение второго усилителя отсутствует, поэтому он не оказывает никакого влияния на работу микросхемы.
Отличительные особенности импульсных и линейных БП.
Существенным преимуществом импульсных источников питания перед линейными является хороший КПД (около 90%)
Давайте рассмотрим структуру любого ШИМ-контроллера. Хоть в своем огромном семействе разные ШИМ-ы и обладают дополнительными функциональными особенностями, но все же они все похожи.
Заглянув в микросхему, мы увидим полупроводниковый кристалл, в котором находятся следующие функциональные составляющие:
Количество этих ключей, зависит от предназначения самого ШИМ-контроллера. Например, простые обратноходовые схемы построены на 1-м силовом ключе, полу мостовые на 2-х, а мостовые преобразователи на 4-х ключах.
![]()
Выбирая ШИМ-контроллер необходимо исходит из того какой ключ используется. Например, если в блоке питания в качестве выходного каскада стоит биполярный транзистор, то подойдет большая часть контроллеров. Связано это с тем, что управлять таким силовым ключом достаточно просто – подавая импульсы на базу транзистора, мы открываем и закрываем его.
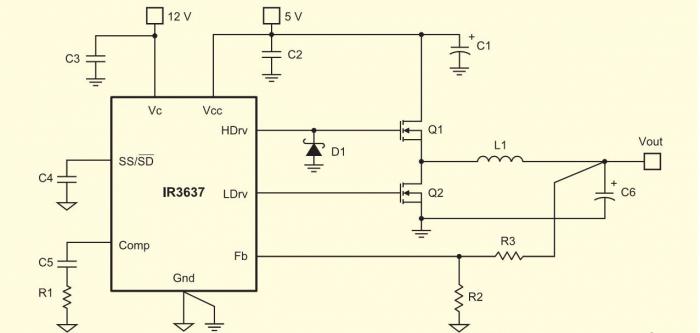
А вот если мы будем использовать полевые транзисторы с изолированным затвором (MOSFET) или IGBT транзисторы, то здесь уже немного сложнее. Выходной транзистор-ключ мало того что нужно открыть – путем заряда затвора, так нам его еще надо и закрыть, естественно разряжая затвор ключа. Для таких схем используются соответствующие ШИМ-контроллеры. У них на выходе стоит 2 транзистора – один заряжает затвор ключа, а другой разряжает, замыкая его на землю.
![]()
Arduino и ШИМ
В уроке про функции времени я рассказывал, что у микроконтроллера есть так называемые счётчики, которые считают “пинки” от тактового генератора (кварца). Данные счётчики как раз и генерируют ШИМ сигнал, т.е. само вычислительное ядро микроконтроллера в этом не участвует. Помимо расчётов, даже вывод сигнала с ноги МК ложится на плечи счётчика. Это очень важно понимать, потому что ШИМ сигнал не тормозит выполнение кода, так как его генерацией занимается буквально “другая железка”.
На платах UNO/Nano/Pro Mini у нас есть три таймера-счётчика, у каждого таймера есть по два выхода на пины МК, то есть у нас есть 2*3=6 пинов, способных генерировать ШИМ сигнал. Для генерации ШИМ у нас есть готовая функция analogWrite(pin, duty)
Совместим эти знания с прошлым уроком и попробуем менять яркость светодиода, подключенного через резистор к пину D3. Потенциометр подключен к пину A0
Рассмотренный пример меняет яркость светодиода в зависимости от положения рукоятки потенциометра.
Пару слов о “стандартном” ШИМ сигнале – мы получаем его с такими настройками, какие нам даёт библиотека Arduino.h, а настройки эти сильно занижены по сравнению с возможностями Arduino. Про “улучшение” ШИМ мы поговорим позже, а сейчас давайте глянем на характеристики ШИМ “из коробки”:
| Таймер | Пины | Частота | Разрешение |
| Timer 0 | D5 и D6 | 976 Гц | 8 бит (0-255) |
| Timer 1 | D9 и D10 | 488 Гц | 8 бит (0-255) |
| Timer 2 | D3 и D11 | 488 Гц | 8 бит (0-255) |
Это весьма плачевные цифры, особенно по частоте. Все таймеры приведены под одну гребёнку, чтобы пользователь не думал не гадал и лишнюю документацию не изучал. К изменению частоты и разрядности ШИМ мы вернёмся в отдельном уроке, а пока что можете посмотреть данный урок в видео варианте.
ШИМ и микроконтроллеры
Простейший генератор ШИМ можно собрать и без всяких микроконтроллеров, только лишь с микросхемой таймера 555. Разумеется, любой микроконтроллер тоже умеет работать с ШИМ сигналом.
Например, у платы Ардуино имеется 6 контактов: 3, 5, 6, 9, 10 и 11, которые можно настроить для генерации аппаратного ШИМ. По-умолчанию, на контактах 5 и 6 частота сигнала будет 1кГц, на остальных — скромные 500Гц. Как ими пользоваться ШИМ на Ардуино подробно рассказывается на уроке «Ардуино: ШИМ» (скоро будет).
STM32F103 — гораздо более серьёзный микроконтроллер. У него целых 20 контактов имеют возможность генерации ШИМ. Частота этого микроконтроллера — 72МГц, что делает возможным плавное и точное управление моторами постоянного тока, не говоря уже о светодиодах. Узнаём подробности в уроке про STM32 и ШИМ.
Кстати, микроконтроллеры умеют не только генерировать ШИМ, но и детектировать подобные сигналы. Про это можно почитать в соответствующей статье на нашем портале (скоро будет).
Основные проблемы ШИМ-преобразователей
При работе любого устройства полностью исключить вероятность поломки невозможно, и преобразователей это тоже касается. Сложность конструкции при этом не имеет значения, проблемы в эксплуатации может вызвать даже известный ШИМ-контроллер TL494. Неисправности имеют различную природу – некоторые из них можно выявить на глаз, а для обнаружения других требуется специальное измерительное оборудование.
Чтобы узнать, как проверить ШИМ-контроллер, следует ознакомится со списком основных неисправностей приборов, а лишь позже – с вариантами их устранения.
Диагностика неисправностей
Одна из часто встречающихся проблем – пробой ключевых транзисторов. Результаты можно увидеть не только при попытке запуска устройства, но и при его обследовании с помощью мультиметра.
![]()
Кроме того, существуют и другие неисправности, которые несколько сложнее обнаружить. Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру:
Как сделать устройство управления своими руками
Изготовление устройства своими руками доступно только тем, кто имеет некоторые навыки работы с паяльником, в состоянии уверенно читать схемы и вообще имеет хотя бы общее представление об электротехнике и принципах работы электронных устройств. Подходить к вопросу без понимания его сути бессмысленно, так как малейшая ошибка поставит такого мастера в тупик.
Расчет контроллера
Этот момент довольно сложен и зачастую выполняется не столько именно путем расчетов, сколько подгонкой параметров балластного регулятора к имеющимся характеристикам ветрогенератора. Дело в том, что каждое устройство имеет собственные рабочие показатели, несоответствие которым не позволит контроллеру качественно выполнять свои функции. Например, если для устройства потребуется 12 вольт для начала зарядки, а контроллер собран на 24, то такая система попросту не сможет работать.
Для расчета контроллера надо снять все рабочие характеристики с генератора, т.е. проверить ветряк с установленным генератором на производительность в разных режимах работы — на слабых, средних и сильных ветрах. Учесть преобладающую скорость потока, при которой устройство будет работать практически все время. На основании этих данных выбирается напряжение, при котором открывается транзистор, переключающий устройство с одного режима на другой и наоборот.
Подготовительные работы
Прежде, чем приступить к сборке, надо приготовить все необходимые детали, тщательно проверить их номинал. Потребуются инструменты и материалы:
Создание печатной платы — непростой процесс, требующий наличия определенных приспособлений, химикатов и пластины фольгированного гетинакса. Проще использовать готовую монтажную панель или обычную пластину из фанеры, пластика или прочих листовых материалов. Тщательно продумать размещение всех элементов на пластине. Рекомендуется объединять их по категориям, чтобы все однотипные детали были сгруппированы в одних местах, так будет проще ориентироваться во время ремонтных работ.
Необходимо предусмотреть световую сигнализацию, свидетельствующую о текущем режиме работы устройства, чтобы при первом же взгляде было сразу видно, загрузка или отдача энергии происходит в данный момент.
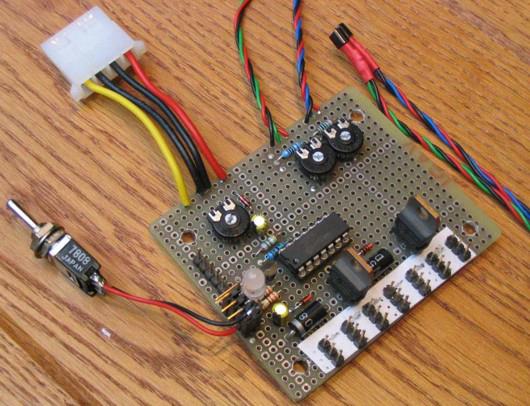
Сборка устройства
При должной подготовке и наличии всех необходимых деталей процесс сборки особых проблем не вызывает. Основная задача — правильное соединение всех элементов в соответствии со схемой. При аккуратной и внимательной сборке устройство будет выполнять поставленную задачу вполне качественно, главное, чтобы все детали были исправными и соответствовали заявленным номиналам.
![]()
![]()
![]()
Схемные решения для сборки своими руками
За всё время с момента появления первых самодельных ветряков количество схемных решений контроллеров выросло многократно. Многие из схемных разработок далеко не совершенны, но есть и такие варианты, на которые следует обратить внимание.
Для бытового применения, конечно же, актуальными являются простые схемы, требующие небольших финансовых вложений, эффективные и надёжные.
Отталкиваясь от этих требований, начать можно с контроллера для ветрогенератора, созданного на базе реле-регуляторов автомобилей. В схеме применимы как реле с минусовым управляющим контактом, так и реле с плюсовым управляющим контактом.
Этот вариант привлекает малым количеством деталей и простейшим монтажом. Потребуется всего одно реле, один силовой транзистор (полевой), один резистор.
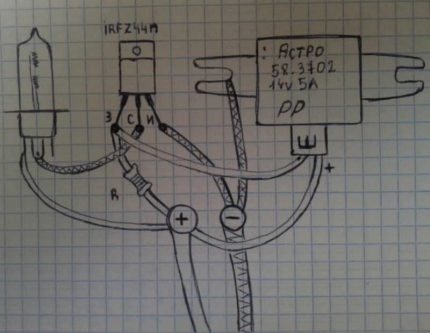
Схема контроллера, вычерченная неким электронщиком своими руками. Здесь всё просто и понятно без лишних слов. Собственно, как и в самой технологичности решения. Минимум деталей – максимум сбережений (+)
Схема носит название «балластная», так как в ней используется дополнительная нагрузка в виде обычной лампочки накаливания. Таким образом, список деталей пополнится ещё одним элементом – лампой.
Используется автомобильная лампа (или несколько ламп) на 12 вольт в зависимости от мощности системы. Также вместо этого элемента допустимо применять нагрузочное сопротивление иного типа: мощный резистор, электронагреватель, вентилятор и т.п.
Работа «балластной» схемы с минусом
Действие автомобильного реле-регулятора напрямую связано с уровнем заряда аккумуляторной батареи. Если напряжение на клеммах АКБ поднимается выше 14.2 вольт, реле срабатывает и размыкает минусовую цепь силового транзистора.
В свою очередь на транзисторе открывается переход, подключающий лампу прямого накала к аккумулятору. В итоге зарядный ток сбрасывается через нить лампы накаливания. При понижении напряжения на клеммах АКБ – обратный процесс. Так осуществляется поддержка стабильного уровня напряжения батареи.
Как действует «балластная» схема с плюсом
Слегка модернизированным вариантом «балластного» контроллера заряда для ветряка является вторая схема на реле-регуляторе с плюсовым управляющим контактом. Например, подойдут реле от автомобилей марки «ВАЗ».
Отличие от предыдущей схемы – применение твердотельного реле, например, GTH6048ZA2 на ток 60A вместо транзистора. Преимущества очевидны: схема выглядит ещё проще и при этом обладает большей надёжностью и эффективностью.
Ещё одно простейшее схемотехническое решение под сборку контроллера заряда АКБ ветрогенератора. Эффективность и надёжность схемы повышается за счёт применения в ней твердотельного реле (+)
Особенность этого простого решения – прямое подключение на клеммы аккумулятора генератора ветряка. Проводники контроллера заряда тоже «посажены» непосредственно на контакты аккумулятора.
По факту обе этих части схемы никак не связаны между собой. Напряжение с ветрогенератора подаётся на батарею постоянно. Когда напряжение на клеммах АКБ достигает значения 14.2 Вт, твердотельное реле подключает нагрузку для сброса. Так аккумулятор защищается устройством от перезаряда.
Здесь балластной нагрузкой может выступать не только лампа накаливания. Вполне реально подключить любое иное устройство, рассчитанное на ток до 60 А. Например, электрический трубчатый нагреватель.
Что ещё важно в этой схеме – действие твердотельного реле характеризуется плавно нарастающей амплитудой. По сути, налицо эффект профессионально изготовленного ШИМ-контроллера.
Усложнённый вариант схемы контроллера
Если предыдущий вариант схемного решения контроллера заряда АКБ только лишь напоминает устройство ШИМ (широтно-импульсная модуляция), здесь данный принцип реализуется конкретно.
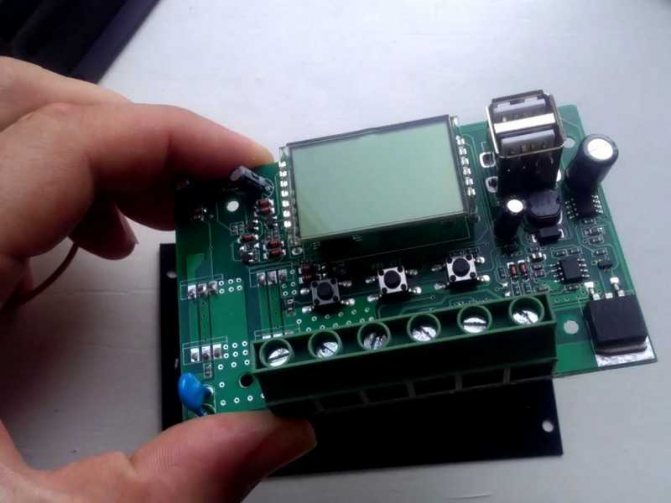
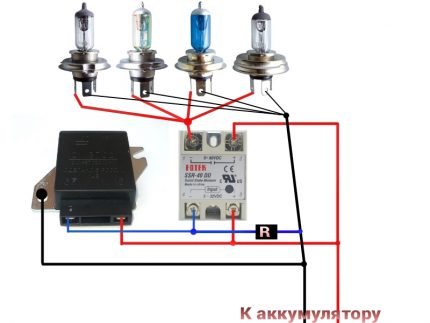
Эта схема контроллера для ветряка с трёхфазным генератором отличается некоторыми сложностями, так как предполагает использование микросхем – в частности, операционных усилителей на полевых транзисторах в составе сборки TL084.
Однако на монтажной плате всё выглядит не так сложно, как на бумажном листе.
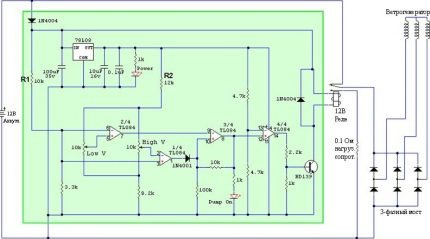
Схемное решение для сборки контроллера своими руками, где используется микросборка TL084. Принцип работы также выстроен с применением реле для переключения режимов, но есть возможность регулировать точки отсечки (+)
Так же, как и в предыдущих решениях, используется реле в качестве коммутационного элемента для балластной нагрузки. Реле рассчитано на работу с 12-вольтовым аккумулятором, но при желании можно подобрать модель на 24 Вт.
Балластный резистор сделан в виде мощного сопротивления (намотка на керамике нихром). Для регулировки рабочего диапазона напряжений (11.5-18 Вт) в схеме используются переменные резисторы, включенные в цепь управления микроэлектронной сборки TL084.
Работает такой контроллер заряда аккумулятора ветряка следующим образом. Трёхфазный ток, полученный от ветрогенератора, выпрямляется силовыми диодами.
На выходе диодного моста образуется постоянное напряжение, которое подаётся на вход схемы через контакты реле, дополнительный диод, аккумулятор и дальше на внутрисхемный стабилизатор (78L08) и на вход сборки TL084.
Момент переключения триггера в одно из состояний определяется значениями переменных резисторов (Low V и High V) нижнего и верхнего порога напряжений.
Пока на клеммах аккумуляторной батареи присутствует напряжение, не превышающее 14.2 вольта (удовлетворяющее значению настройки R High V), выполняется заряд. Как только значения изменяются в сторону увеличения, операционный усилитель TL084 подаёт сигнал на базу транзистора, которым управляется реле.
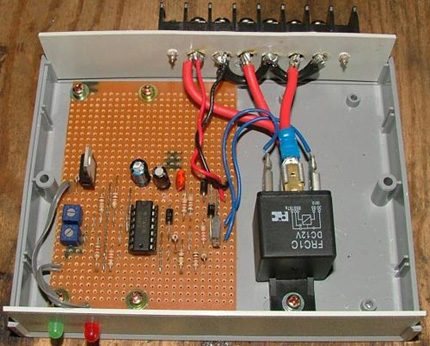
Реализованный своими руками продукт по схеме с микросборкой TL084. Всё предельно просто, даже вместо качественной печатной платы выбрана плата под навесной монтаж. Такими моментами всегда радуют самодельные конструкции
Происходит срабатывание реле, цепь питания схемы разрывается и замыкается на балластный резистор. Сброс по балласту проходит до момента разряда аккумулятора, близкого к значению настройки переменного резистора Low V.
Как только это значение достигнуто, вторым операционным усилителем TL084 схема переключается в обратное состояние. Так осуществляется работа контроллера.
В чем отличие между шим и шир
На Западе понятия широтно-импульсного регулирования ШИР и ШИМ практически не различаются. Однако у нас между ними все же существует различие. Во многих микросхемах реализован принцип ШИР, однако при этом они все равно называются ШИМ контроллеры. Таким образом различий в названии этих двух способов практически нет.
Единственное отличие между ШИР и ШИМ — при ШИР время импульса и паузы постоянны. А при ШИМ их длительности изменяются, что позволяет сформировать выходной ШИМ сигнал заданной формы.