Что такое ПИД-регулятор
ПИД (от англ. P-proportional, I-integral, D-derivative) — регулятором называется устройство, применяемое в контурах управления, оснащенных звеном обратной связи. Данные регуляторы используют для формирования сигнала управления в автоматических системах, где необходимо достичь высоких требований к качеству и точности переходных процессов.
Управляющий сигнал ПИД-регулятора получается в результате сложения трех составляющих: первая пропорциональна величине сигнала рассогласования, вторая — интегралу сигнала рассогласования, третья — его производной. Если какой-то из этих трех компонентов не включен в процесс сложения, то регулятор будет уже не ПИД, а просто пропорциональным, пропорционально-дифференцирующим или пропорционально-интегрирующим.

Первый компонент — пропорциональный
Выходной сигнал дает пропорциональная составляющая. Сигнал этот приводит к противодействию текущему отклонению входной величины, подлежащей регулированию, от установленного значения. Чем больше отклонение — тем больше и сигнал. Когда на входе значение регулируемой величины равно заданному, то выходной сигнал становится равным нулю.
Если оставить только эту пропорциональную составляющую, и использовать только ее, то значение величины, подлежащей регулированию, не стабилизируется на правильном значении никогда. Всегда есть статическая ошибка, равная такому значению отклонения регулируемой величины, что выходной сигнал стабилизируется на этом значении.
К примеру, терморегулятор управляет мощностью нагревательного прибора. Выходной сигнал уменьшается по мере приближения требуемой температуры объекта, и сигнал управления стабилизирует мощность на уровне тепловых потерь. В итоге заданного значения температура так и не достигнет, ибо нагревательный прибор в просто должен будет быть выключен, и начнет остывать (мощность равна нулю).
Больше коэффициент усиления между входом и выходом — меньше статическая ошибка, но если коэффициент усиления (по сути — коэффициент пропорциональности) будет слишком большим, то при условии наличия задержек в системе (а они зачастую неизбежны), в ней вскоре начнутся автоколебания, а если увеличить коэффициент еще больше — система попросту утратит устойчивость.
Или пример позиционирования двигателя с редуктором. При малом коэффициенте нужное положение рабочего органа достигается слишком медленно. Увеличить коэффициент — реакция получится более быстрая. Но если увеличивать коэффициент дальше, то двигатель «перелетит» правильную позицию, и система не перейдет быстро к требуемому положению, как хотелось бы ожидать. Если теперь увеличивать коэффициент пропорциональности дальше, то начнутся осцилляции около нужной точки — результат снова не будет достигнут.

Интеграл по времени от величины рассогласования — есть основная часть интегрирующей составляющей. Она пропорциональна этому интегралу. Интегрирующий компонент используется как раз для исключения статической ошибки, поскольку регулятор со временем учитывает статическую погрешность.
В отсутствие внешних возмущений, через какое-то время подлежащая регулированию величина будет стабилизирована на правильном значении, когда пропорциональная составляющая окажется равной нулю, и точность выхода будет целиком обеспечена интегрирующей составляющей. Но интегрирующая составляющая тоже может породить осцилляции около точки позиционирования, если коэффициент не подобран правильно.
Третий компонент — дифференцирующий
Темпу изменения отклонения величины, подлежащей регулированию, пропорциональна третья — дифференцирующая составляющая. Она необходима для того, чтобы противодействовать отклонениям (вызванным внешними воздействиями или задержками) от правильного положения, прогнозируемого в будущем.
Что такое ПИД простыми словами на примере дрона:
Теория работы ПИД-регулятора
Как вы уже поняли, ПИД-регуляторы применяют для поддержания заданного значения х0 некоторой одной величины, благодаря изменению значения u другой величины. Есть уставка или заданное значение х0, и есть разность или невязка (рассогласование) е = х0-х. Если система линейна и стационарна (практически это вряд ли возможно), то для задания u справедливы нижеследующие формулы:

В этой формуле вы видите коэффициенты пропорциональности для каждого из трех слагаемых.
Практически в ПИД-регуляторах используют для настройки другую формулу, где коэффициент усиления применен сразу ко всем компонентам:

Практическая сторона ПИД-регулирования
Практически теоретический анализ ПИД-регулируемых систем редко применяют. Сложность состоит в том, что характеристики объекта управления неизвестны, и система практически всегда нестационарна и нелинейна.
Реально работающие ПИД-регуляторы всегда имеют ограничение рабочего диапазона снизу и сверху, это принципиально объясняет их нелинейность. Настройка поэтому практически всегда и везде производится экспериментальным путем, когда объект управления подключен к системе управления.
Использование величины, формируемой программным алгоритмом управления, обладает рядом специфических нюансов. Если речь, например, о регулировке температуры, то часто требуется все же не одно, а сразу два устройства: первое управляет нагревом, второе — охлаждением. Первое подает разогретый теплоноситель, второе — хладагент. Три варианта практических решений может быть рассмотрено.

Сегодня системы автоматизации практически все строятся на основе ПЛК, и ПИД-регуляторы представляют собой специальные модули, добавляемые к управляющему контроллеру или вообще реализуемые программно путем загрузки библиотек. Для правильной настройки коэффициентов усиления в таких контроллерах, их разработчики предоставляют специальное ПО.
Structured Text
Книга «Изучаем Structured Text МЭК 61131-3»: Ссылка на книгу
Принцип работы ПИД-регулятора для начинающих
Как следует из названия, в этой статье мы дадим точное представление о структуре и работе ПИД-контроллера. Однако сначала, давайте познакомимся с ПИД-контроллерами.
ПИД-регуляторы находятся в широком диапазоне применений для управления промышленными процессами. Приблизительно 95% операций с замкнутым контуром в промышленной автоматизации используют ПИД-регуляторы. PID обозначает Пропорционально-интегральная-диференциальная составляющая. Эти три контроллера объединены таким образом, что он создает управляющий сигнал.

В качестве контроллера обратной связи он обеспечивает выход управления на желаемых уровнях. ПИД-регулирование осуществлялось с помощью аналоговых электронных компонентов, перед изобретением микропроцессоров. Но сегодня все ПИД-контроллеры обрабатываются микропроцессорами. ПрограммируемыеПрограммируемые логические контроллеры также имеют встроенные настройки ПИД-регулятора. Благодаря гибкости и надежности ПИД-регуляторов, они традиционно используются в системах управления технологическим процессом.
Работа ПИД-регулятора
При использовании недорогого простого контроллера возможны только два состояния управления, например, полностью ВКЛ или полностью ВЫКЛ. Он используется для настроек с ограничением контроля, в котором эти два состояния управления достаточно для целей управления. Однако характер этого контроля ограничивает его использование и, следовательно, заменяется ПИД-контроллерами.
ПИД-регулятор поддерживает выход таким образом, что между переменной процесса и заданной точкой / желаемым выходом с помощью операций замкнутого контура имеется нулевая ошибка. ПИД использует три основных поведения управления, которые объясняются ниже.
П-контроллер:

Пропорциональный или П-регулятор дает выход, который пропорционален текущей ошибке e (t). Он сравнивает желаемую или заданную точку с фактическим значением или значением процесса обратной связи. Полученная ошибка умножается на пропорциональную константу, чтобы получить выход. Если значение ошибки равно нулю, то выход этого контроллера равен нулю.

Этот контроллер требует смещения или ручной сброс при использовании отдельно. Это происходит потому, что он никогда не достигает состояния устойчивого состояния. Он обеспечивает стабильную работу, но всегда поддерживает постоянную ошибку. Скорость реакции возрастает при увеличении пропорциональной константы Kр.
И-контроллер

Из-за ограничения П-контроллера, где всегда существует смещение между переменной процесса и заданным значением, необходим И-контроллер, который обеспечивает необходимые действия для устранения ошибки установившегося состояния. Он интегрирует ошибку в течение периода времени, пока значение ошибки не достигнет нуля. Он содержит значение для конечного устройства управления, при котором ошибка становится равной нулю.
Интегральное управление уменьшает его выход, когда происходит отрицательная ошибка. Он ограничивает скорость реакции и влияет на стабильность системы. Скорость реакции увеличивается за счет уменьшения интегрального усиления Ki.

На приведенном выше рисунке, когда коэффициент усиления И-контроллера уменьшается, ошибка установившегося режима также продолжает уменьшаться. В большинстве случаев контроллер ПИ используется, в частности, когда требуется высокая скорость ответа.
При использовании ПИ-регулятора выход И-контроллера ограничен некоторым диапазоном для преодоления интегральных условий, когда интегральный выход растет даже при нулевом состоянии ошибки из-за нелинейности на установке.
Д-контроллер

И-контроллер не может предсказать будущее поведение ошибки. Поэтому он реагирует нормально после изменения заданного значения. Д-контроллер преодолевает эту проблему, ожидая будущего поведения ошибки. Его выход зависит от скорости изменения погрешности за время, умноженное на постоянную производной. Это дает начало запуска для выхода, тем самым увеличивая системный отклик.

На приведенном выше рисунке ответ контроллера Д больше, по сравнению с контроллером ПИ, а также время установления выходного сигнала уменьшается. Это улучшает стабильность системы за счет компенсации фазового запаздывания, вызванного И-контроллером. Увеличение производного усиления увеличивает скорость реакции..
Итак, наконец, мы заметили, что, объединив эти три контроллера, мы получим желаемый ответ для системы. Различные производители разрабатывают различные алгоритмы ПИД.
Методы настройки ПИД-регулятора
Перед началом работы ПИД-регулятора он должен быть настроен на динамику контролируемого процесса. Дизайнеры дают значения по умолчанию для параметров П, И, Д, и эти значения не могут дать желаемую производительность, а иногда приводят к нестабильности и медленным характеристикам управления. Разработаны различные методы настройки для настройки ПИД-регуляторов и требуют от оператора большого внимания для выбора наилучших значений пропорциональных, интегральных и диференциальных коэффициентов. Некоторые из них приведены ниже.
Метод проб и ошибок: это простой способ настройки ПИД-регулятора. Пока система или контроллер работают, мы можем настроить контроллер. В этом методе сначала нужно установить значения Ki и Kd в нуль и увеличить пропорциональный коэффициент (Kp), пока система не достигнет колебательного поведения. Как только он осциллирует, отрегулируйте Ki (интегральный термин), чтобы колебания остановились и, наконец, отрегулировали Д, чтобы получить быстрый отклик.
Технологическая кривая технологического процесса: это метод настройки с открытым циклом. Он производит ответ, когда к системе применяется шаг ввода. Первоначально мы должны вручную вводить некоторые данные управления в систему и записывать кривую ответа.
После этого нам нужно рассчитать наклон, неподвижное время, время нарастания кривой и, наконец, подставить эти значения в уравнениях П, И и Д, чтобы получить значения коэффициента усиления ПИД.

Метод Zeigler-Nichols: Zeigler-Nichols предложил методы замкнутого контура для настройки ПИД-регулятора. Это метод непрерывного циклирования и метод демпфирования колебаний. Процедуры для обоих методов одинаковы, но поведение колебаний различно. При этом сначала нужно установить постоянную p-контроллера, Kp на определенное значение, а значения Ki и Kd равны нулю. Пропорциональный коэффициент усиления увеличивается до тех пор, пока система не будет колебаться с постоянной амплитудой.
Усиление, при котором система производит постоянные колебания, называется конечным усилением (Ku), а период колебаний называется предельным периодом (Pc). Как только это достигнуто, мы можем ввести значения P, I и D в ПИД-контроллере по таблице Zeigler-Nichols, зависит от контроллера, используемого как P, PI или PID, как показано ниже.

Структура ПИД-регулятора
ПИД-регулятор состоит из трех членов, а именно пропорционального, интегрального и диференциального. Объединенная работа этих трех контроллеров дает стратегию управления процессом контроля. ПИД-регулятор управляет переменными процесса, такими как давление, скорость, температура, расход и т. д. В некоторых приложениях используются ПИД-регуляторы в каскадных схемах, где для достижения контроля используются два или более ПИД.

На приведенном выше рисунке показана структура ПИД-регулятора. Он состоит из блока PID, который дает свой вывод для обработки блока. Процесс / установка состоит из конечных устройств управления, таких как исполнительные механизмы, регулирующие клапаны и другие управляющие устройства для управления различными процессами промышленности / установки.
Сигнал обратной связи от технологической установки сравнивается с уставкой или сигналом u (t), и соответствующий сигнал ошибки e (t) подается на алгоритм ПИД-регулирования. Согласно пропорциональным, интегральным и диференциальным расчетам в алгоритме, контроллер производит комбинированный ответ или управляемый выход, который применяется к устройствам управления установкой.
Все управляющие приложения не нуждаются во всех трех элементах управления. Комбинации, такие как элементы управления PI и PD, очень часто используются в практических приложениях.
ПИД-регулятор. Методика настройки
2020-07-10  Промышленное
Промышленное  12 комментариев
12 комментариев
ПИД-регулятор (пропорционально-интегрально-дифференциальный) — устройство, с обратной связью, применяемое в автоматических системах управления для поддержания заданного значения параметра. Благодаря своей универсальности они широко применяются в различных технологических процессах.

Выходной сигнал регулятора определяется по следующей формуле:
u (t) = P + I + D = Kp e (t) + Ki ∫e (t) dt + Kd de (t)/dt
u (t) – выходной сигнал регулятора;
P – пропорциональная составляющая;
I – интегрирующая составляющая;
D – дифференцирующая составляющая;
Ki — интегральный коэффициент
Kd – дифференциальный коэффициент
e (t) – ошибка рассогласования
Задачи ПИД-регулятора в системах АСУ ТП
Основная задача ПИД регулятора состоит в поддержании определенного значения параметра технологического процесса на заданном уровне. То есть говоря простым языком, задача ПИД-регулятора заключается в том, чтобы учитывая полученные значения с датчиков (обратная связь) воздействовать на объект управления, плавно подводя регулируемое значение к заданным уставкам. Применение ПИД регуляторов целесообразно, а зачастую и единственно возможно в процессах, где необходима высокая точность переходных процессов, непрерывный контроль и регулирование заданных параметров, недопустимы значительные колебания в системе.
Сравнение ПИД –регулятора с позиционным регулированием
В системах АСУ ТП наибольшее распространение получили два типа регуляторов – двухпозиционный и ПИД.
Двухпозиционный регулятор наиболее простой в использовании и широко распространенный.
Данный тип регулятора сравнивает значение входной величины с заданным параметром уставки. Если значение измеренной величины ниже заданного значения уставки, регулятор включает исполнительное устройство, при превышении заданного значения, исполнительное устройство выключается. Для предотвращения слишком частого срабатывания устройства, в следствии колебаний системы и следовательно изменении значений, задается минимальный и максимальный порог срабатывания — гистерезис, или по другому зона нечувствительности, мертвая зона, дифференциал. Например, нам необходимо поддерживать температуру в 15°С. Если гистерезис задан 2°, то регулятор будет включать нагрев при 14°С и отключать соответственно при 16°С.
Так или иначе, при таком типе регулирования происходят незатухающие колебания, частота и амплитуда которых зависит от параметров системы. Поэтому данный метод обеспечивает хороший результат в системах, обладающих инерционностью и малым запаздыванием. В частности, такой метод широко применяется при регулировании температуры в нагревательных печах.
В отличии от двухпозиционного с помощью ПИД-регулятора удается свести колебания системы к минимуму, благодаря тому, что при таком методе регулирования учитываются различные значения системы — фактическая величина, заданное значение, разность, скорость. Это позволяет стабилизировать систему и добиться повышения точности в десятки раз по сравнению с двухпозиционным методом. Конечно, здесь многое зависит от правильно подобранных коэффициентов ПИД регулятора.
Составляющие ПИД-регулятора
В стандартном ПИД-регуляторе есть три составляющие и каждая из них по своему воздействует на управление.
Пропорциональная — P (t) = Kp * e (t)
Учитывает величину рассогласования заданного значения и фактического. Чем больше отклонения значения, тем больше будет выходной сигнал, то есть пропорциональная составляющая пытается компенсировать эту разницу.
Однако пропорциональный регулятор не способен компенсировать полностью ошибку рассогласования. Всегда будет присутствовать так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. При увеличении коэффициента пропорциональности Kp статическая ошибка уменьшается, но могут возникнуть автоколебания и снижение устойчивости системы.
Интегральная – I (t) = Ki ∫e (t) dt
Интегральная составляющая используется для устранения статической ошибки. Она складывает значение предыдущих ошибок рассогласования и компенсирует их, можно сказать, что учится на предыдущих ошибках. То есть ошибка рассогласования умножается на коэффициент интегрирования и прибавляется к предыдущему значению интегрирующего звена. При выходе системы на заданный режим, интегральная составляющая перестает изменяться и не оказывает какого-либо серьезного воздействия на систему. Физически интегральная составляющая представляет задержку реакции регулятора на изменение величины рассогласования, внося в систему некоторую инерционность, что может быть полезно для управления объектами c большой чувствительностью.
Дифференциальная – D (t) = Kd de (t)/dt
Дифференциальная составляющая учитывает скорость изменения регулируемой величины, противодействуя предполагаемым отклонениям, вызванными возмущениями системы или запаздыванием. И чем больше будет величина отклоняться от заданной, тем сильнее будет противодействие, оказываемое дифференциальной составляющей. То есть она предугадывает поведение системы в будущем. При достижении величины рассогласования постоянного значения дифференциальная составляющая перестает оказывать воздействие на управляющий сигнал.
На практике какая-либо из составляющих может не использоваться (чаще всего Д-дифференциальная) и тогда мы получаем П-регулятор, ПИ-регулятор.
Методика настройки ПИД-регулятора
Выбор алгоритма управления и его настройка является основной задачей в процессе проектирования и последующего удовлетворительного запуска агрегата в промышленную или иную эксплуатацию.
В основе методики лежит закон Циглера-Никольса, являющийся эмпирическим и основанным на использовании данных, полученных экспериментально на реальном объекте.
В результате ознакомления с методикой, а также при близком рассмотрении объектов регулирования, были выбраны формулы и коэффициенты ближе всего подходящие к реальному объекту регулирования.
Объект регулирования – камерная электрическая печь. Число зон регулирования от 24 до 40. Каждая зона есть набор электронагревателей. Материал нагревателей нихром. Тип — проволочные, навитые на керамические трубки.
Требования: поддержание температуры по зонам печи +/- 5С.
МЕТОДИКА:
Настройка пропорциональной компоненты (Xp)

Тο — начальная температура в системе;
Тsp — заданная температура (уставка);
∆T — размах колебаний температуры;
∆t — период колебаний температуры.
Система должна находится в постоянном колебательном процессе, притом колебательный процесс незатухающий, где ∆T– характеристика колебания равная значению величины рассогласования (±10С, или как по заданию). Колебания должны быть одинаковы от Тsp.
После получения данной кривой на нашем объекте, засекаем время периода колебаний ʌt – полный период. Данное время есть характеристика системы, оборудования.
3. Используя полученные параметры рассчитываем Ти и Тд.
| Зона пропорциональности | Коэффициент передачи | Постоянная времени интегрирования | Постоянная времени дифференцирования | |
| П-регулятор | 2*PBs | 0.5*Xp | ||
| ПИ-регулятор | 2.2*PBs | 0.45*Xp | 0.83*ʌТ | |
| ПИД-регулятор | 1.67*PBs | 0.6*Xp | 0.5*ʌТ | 0.125*ʌТ |
Цифры в формулах для расчета коэффициентов ПИД-регулирования скорректированы на основе запуска камерной электрической печи в опытно-промышленную эксплуатацию. И конечно в зависимости от типа объекта регулирования могут незначительно меняться.
Вывод
Благодаря достаточно высоким получаемым результатам ПИД-регуляторы нашли широкое применение в системах автоматического управления.
При этом важно подчеркнуть, что настройка ПИД-регулятора является процессом довольно трудоемким и требует определенных знаний и индивидуального подхода для различных объектов управления.
Что такое ПИД регулятор для чайников?
Дифференциальный пропорционально-интегральный регулятор — устройство, которое устанавливают в автоматизированных системах для поддержания заданного параметра, способного к изменениям.
На первый взгляд все запутанно, но можно объяснить ПИД регулирование и для чайников, т.е. людей, не совсем знакомых с электронными системами и приборами.
Что такое ПИД регулятор?
ПИД регулятор — прибор, встроенный в управляющий контур, с обязательной обратной связью. Он предназначен для поддержания установленных уровней задаваемых величин, например, температуры воздуха.
Устройство подает управляющий или выходной сигнал на устройство регулирования, на основании полученных данных от датчиков или сенсоров. Контроллеры обладают высокими показателями точности переходных процессов и качеством выполнения поставленной задачи.

Три коэффициента ПИД регулятора и принцип работы
Работа ПИД-регулятора заключается в подаче выходного сигнала о силе мощности, необходимой для поддержания регулируемого параметра на заданном уровне. Для вычисления показателя используют сложную математическую формулу, в составе которой есть 3 коэффициента — пропорциональный, интегральный, дифференциальный.
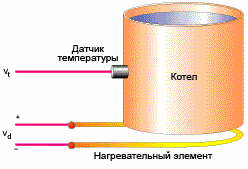
Возьмем в качестве объекта регулирования ёмкость с водой, в которой необходимо поддерживать температуру на заданном уровне с помощью регулирования степени открытия клапана с паром.
Пропорциональная составляющая появляется в момент рассогласования с вводными данными. Простыми словами это звучит так — берется разница между фактической температурой и желаемой, умножается на настраиваемый коэффициент и получается выходной сигнал, который должен подаваться на клапан. Т.е. как только градусы упали, запускается процесс нагрева, поднялись выше желаемой отметки — происходит выключение или даже охлаждение.
Дальше вступает интегральная составляющая, которая предназначена для того, чтобы компенсировать воздействие окружающей среды или других возмущающих воздействий на поддержание нашей температуры на заданном уровне. Поскольку всегда присутствуют дополнительные факторы, влияющие на управляемые приборы, в момент поступления данных для вычисления пропорциональной составляющей, цифра уже меняется. И чем больше внешнее воздействие, тем сильнее происходят колебания показателя. Происходят скачки подаваемой мощности.
Интегральная составляющая пытается на основе прошлых значений температуры, вернуть её значение, если оно поменялось. Подробнее процесс описан в видео ниже.
А дальше выходной сигнал регулятора, согласно коэффициенту, подается для повышения или понижения температуры. Со временем подбирается та величина, которая компенсирует внешние факторы, и скачки исчезают.
Интеграл используется для исключения ошибок путем расчета статической погрешности. Главное в этом процессе — подобрать правильный коэффициент, иначе ошибка (рассогласование) будет влиять и на интегральную составляющую.